Parallel three-degree-of-freedom ankle joint rehabilitation robot
A technology of rehabilitation robot and degree of freedom, which is applied in the field of medical rehabilitation training equipment, can solve problems such as limited range of motion of the ankle joint, difficulty in achieving good control, and patients' inability to actively train human-computer interaction, etc., to achieve easy portability, transportation, mechanical The effect of low processing cost and avoiding secondary damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
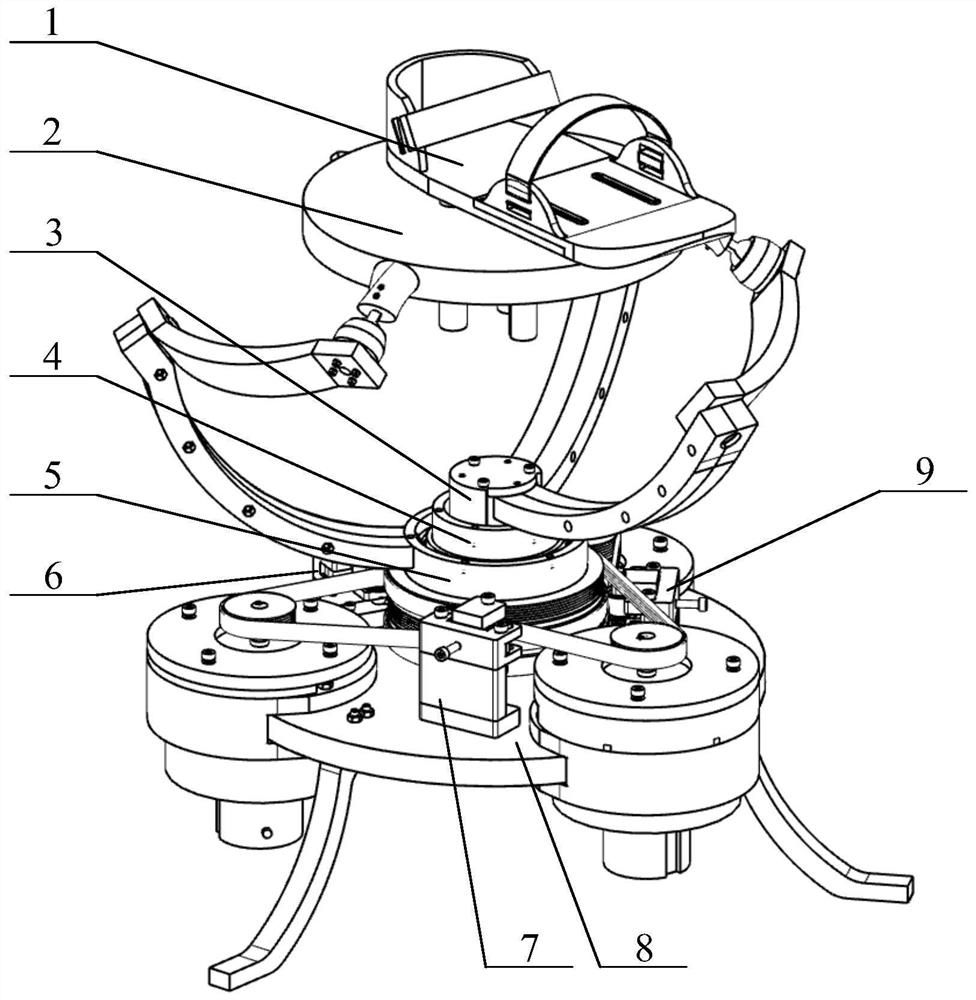
[0042] combined with figure 1 , attached figure 2 , to further describe the present invention:
[0043] A parallel three-degree-of-freedom ankle joint rehabilitation robot mentioned in the present invention includes an adjustable foot pedal 1, a moving platform 2, an inner branch chain 3, a middle branch chain 4, an outer branch chain 5, and the first pulley tensioner Device 6, the third pulley tensioning device 7, static platform 8, the second pulley tensioning device 9.
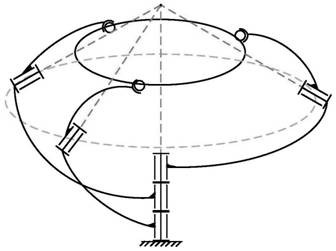
[0044] There are three kinematic pairs in the branch chain involved in the present invention, which are the base shaft rotation pair R, the intermediate rotation pair R, and the ball pair S. A single branch chain constitutes an RRS configuration, and the three branch chain kinematic pairs have the same configuration. The three branch chains are The rotating pair of the base shaft is assembled coaxially, and the robot as a whole is a 3-RRS parallel mechanism.
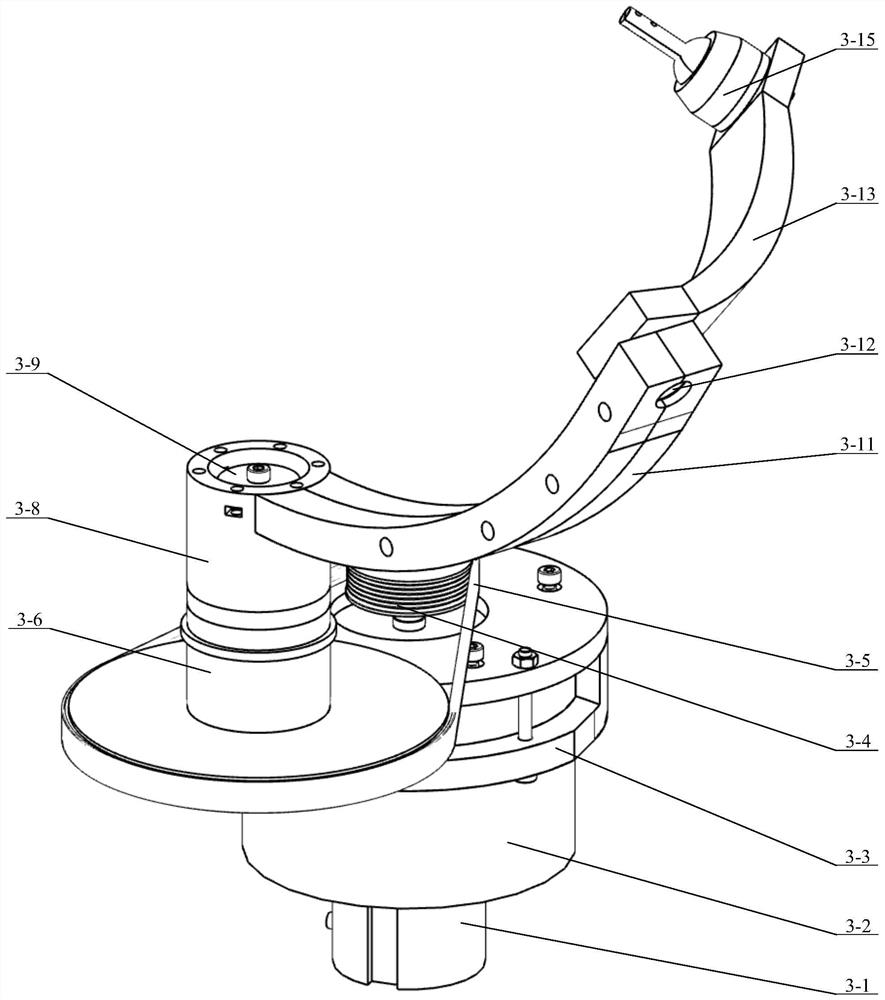
[0045] The inner branch chain 3, the middle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com