Intelligent vehicle lane changing track collaborative planning method based on instantaneous risk assessment
A technology for intelligent vehicles and risk assessment, applied in traffic control systems, instruments, traffic control systems, etc. of road vehicles, can solve the problem of difficult to assess the risk of changing lanes in advance, and less consideration of the game relationship between lane changing vehicles and surrounding vehicles and their interaction effects , only consider issues such as
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0135] The present invention will be further described below in conjunction with specific examples.
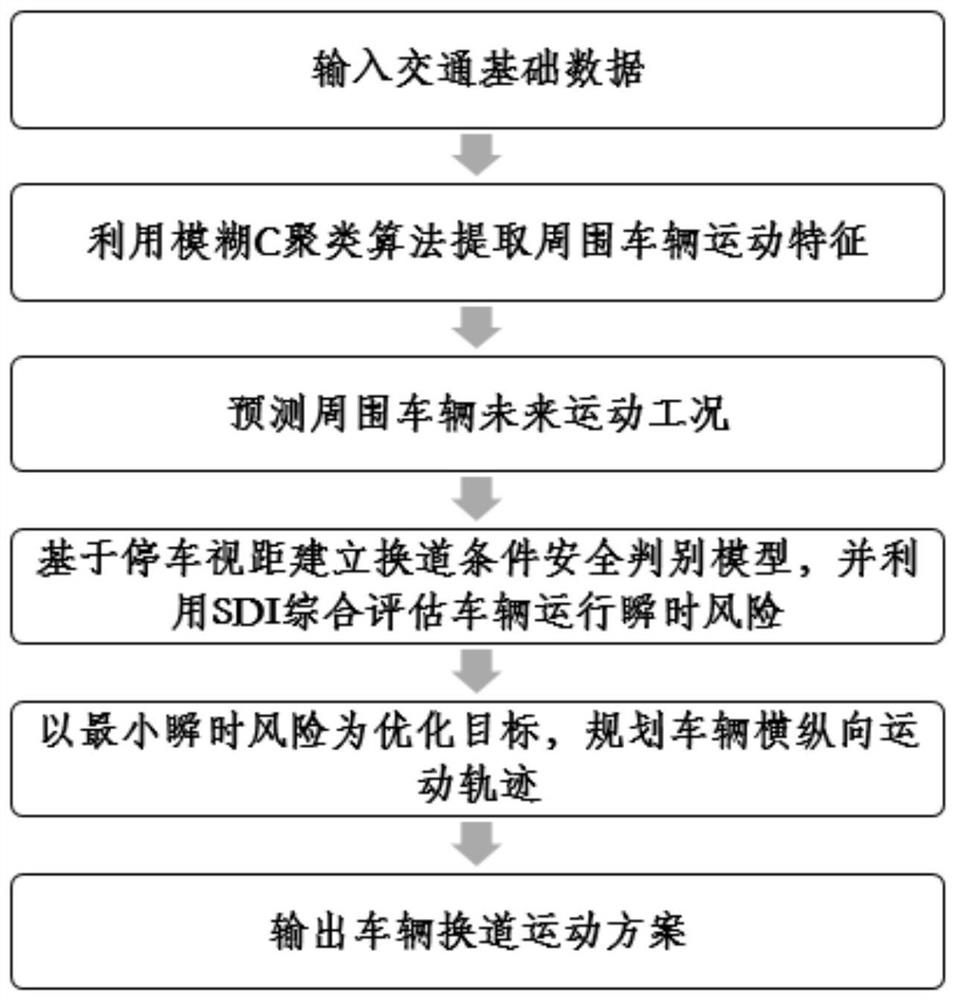
[0136] like figure 1 As shown, the collaborative planning method for lane-changing trajectories of intelligent vehicles based on instantaneous risk assessment provided by this embodiment is as follows:
[0137] 1) Obtain traffic basic data. Traffic basic data includes vehicle motion data, vehicle relative position information, vehicle geometric parameters, road geometric conditions and road surface friction coefficient;
[0138] The vehicle motion data includes the speed and acceleration of the target vehicle and the surrounding vehicles, and real-time vehicle motion data can be obtained through the on-board sensors of the intelligent vehicle or roadside monitoring equipment; the relative position information of the vehicle includes the target vehicle and the vehicle in front of the current lane, The inter-vehicle distance of the following vehicle, the inter-vehicle distance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com