Industrial mobile robot positioning method in high-dynamic environment
A mobile robot, high dynamic environment technology, applied in the direction of instruments, navigation calculation tools, measuring devices, etc., can solve the problems that the positioning cannot meet the positioning requirements, high equipment investment costs, and high investment costs, and achieve low equipment investment costs and equipment investment. Low cost and highly adaptable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
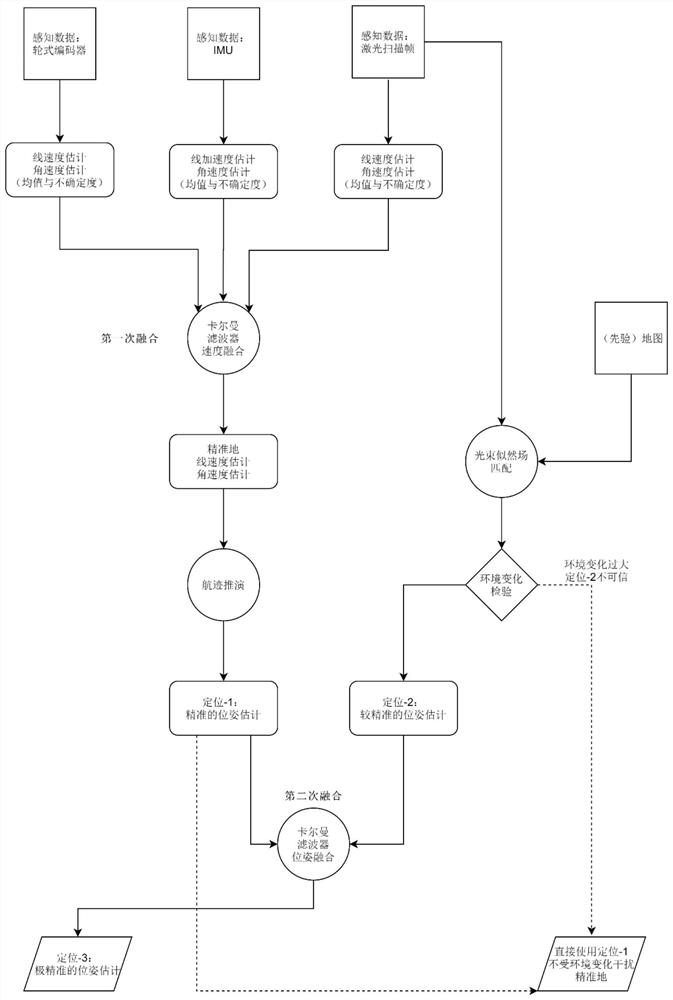
[0041] Such as figure 1 As shown, this embodiment provides a positioning method for an industrial mobile robot in a highly dynamic environment, where a wheel encoder, an inertial measurement unit and a laser scanning unit are installed on the industrial mobile robot, and the positioning method includes the following steps :
[0042] Step 1: Perceptual data acquisition and conversion into velocity estimation (ie, linear velocity, angular velocity, and degree of uncertainty);
[0043] (1) Use the wheel encoder to collect the motor rotation information, and calculate the linear velocity estimate and the angular velocity estimate according to the preset motion model of the industrial mobile robot; calculate the covariance matrix statistically based on the velocity estimate and the actual velocity;
[0044] (2) The inertial measurement unit IMU includes a three-axis accelerometer, a three-axis gyroscope, and a three-axis magnetometer. Through conventional nine-axis data fusion an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com