Rigid-flexible coupling wearable walking aid exoskeleton system
A rigid-flexible coupling, exoskeleton technology, applied in the field of exoskeleton, can solve the problems of low inertia, poor human-machine fit, unable to support the lower limbs, etc., to achieve the effect of convenient wearing and taking off, high coordination, and improved consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Typical embodiments that embody the features and advantages of the present invention will be described in detail in the following description. It should be understood that the present invention is capable of various changes in different embodiments without departing from the scope of the present invention, and that the description and illustrations therein are illustrative in nature and not limiting. this invention.
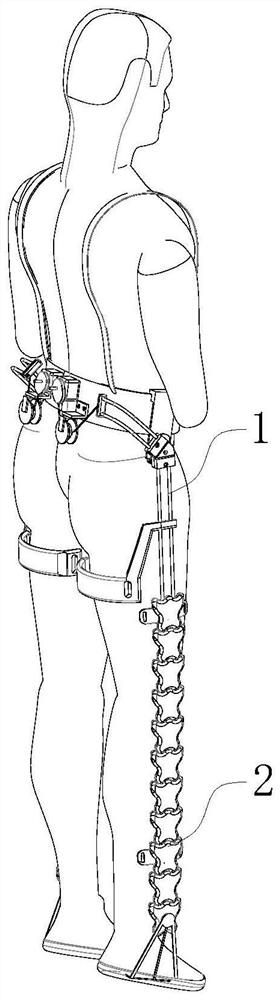
[0033] refer to figure 1 , the rigid-flexible coupling wearable walking aid exoskeleton system in this embodiment includes a power assist system 1 and a support system 2 .
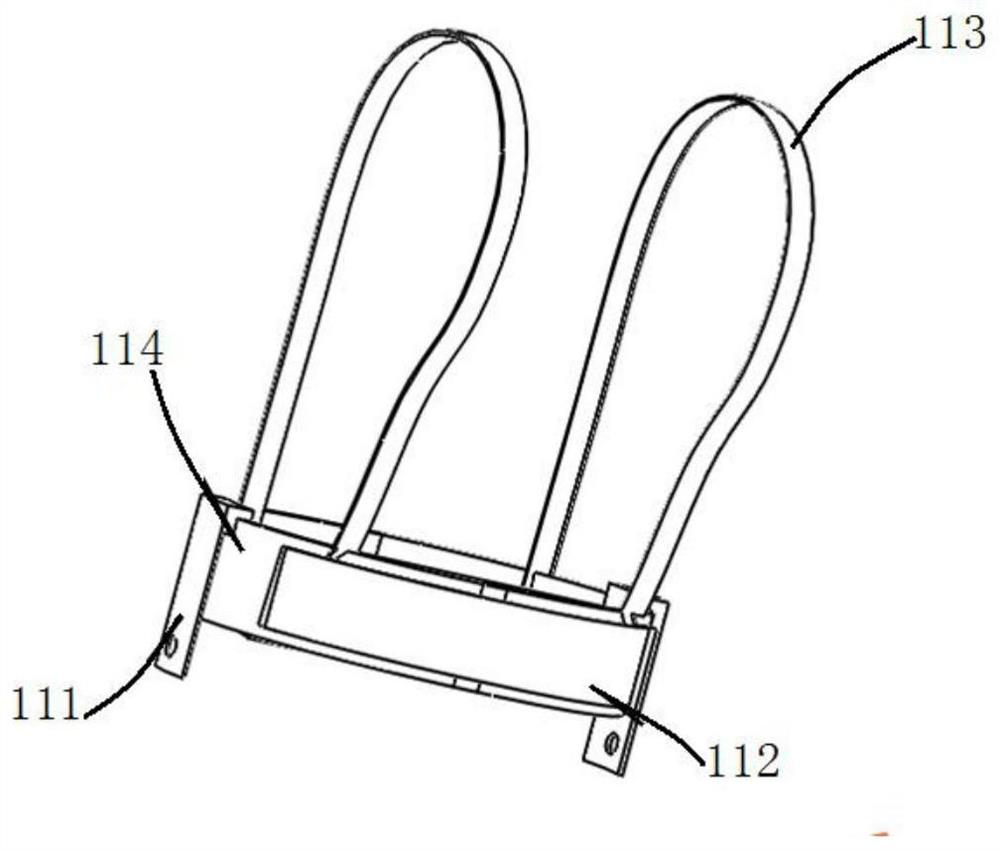
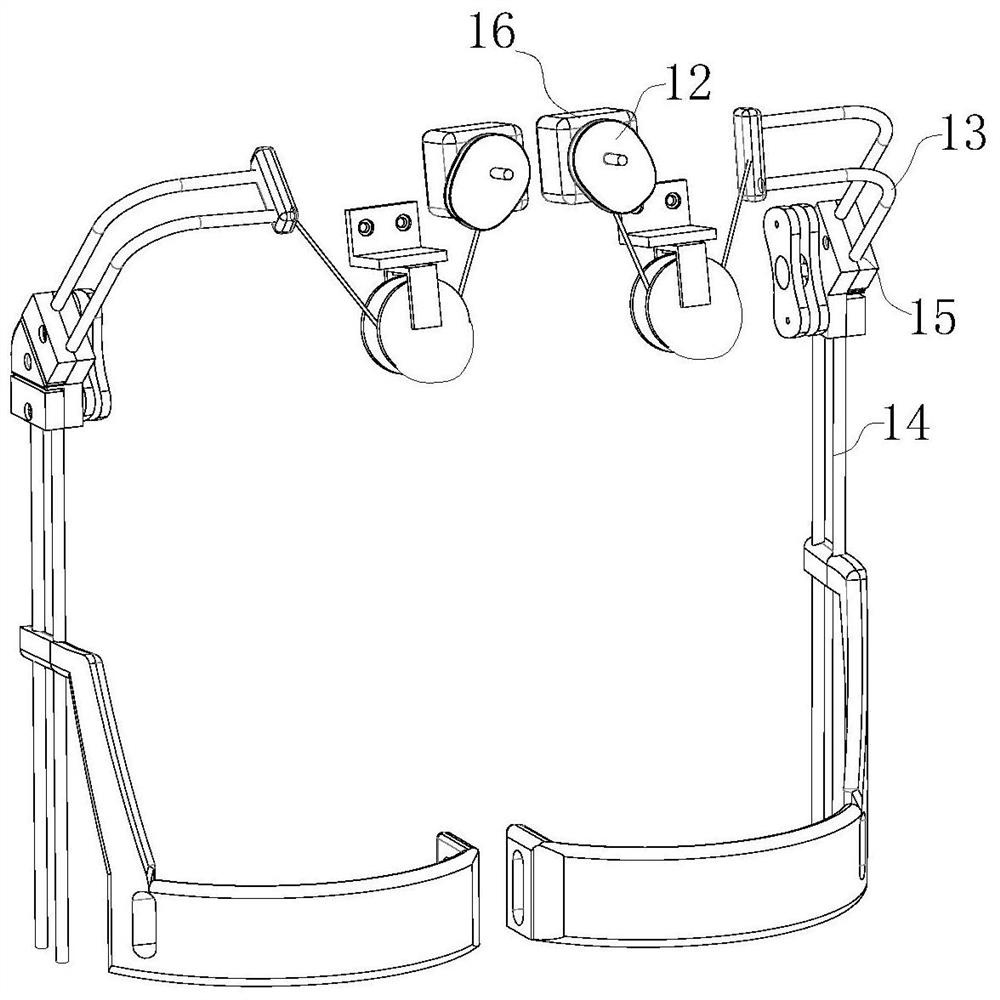
[0034] refer to figure 2 , 3, the booster system 1 includes a waist wearing mechanism 11 and a power mechanism. The waist wearing mechanism 11 includes a waist fixing plate. The waist fixing plate includes a main body fixing plate 111 and an auxiliary fixing plate 112. Both the main body fixing plate 111 and the auxiliary fixing plate 112 are arc-shaped thin plate structures, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com