A fault-tolerant control method for quadrotor formation based on adaptive neural network
A neural network, fault-tolerant control technology, applied in the field of multi-agent systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
[0122] And consider the failure of the actuator part of the first aircraft during the formation process, and the second and third aircraft have never failed during the operation. The time and size of the first aircraft's actuator failure are as follows:
[0123]
[0124] In order to verify the fault-tolerant control effect of the present invention, use the Simulink platform of MATLAB to carry out simulation verification, and the simulation results are as follows:
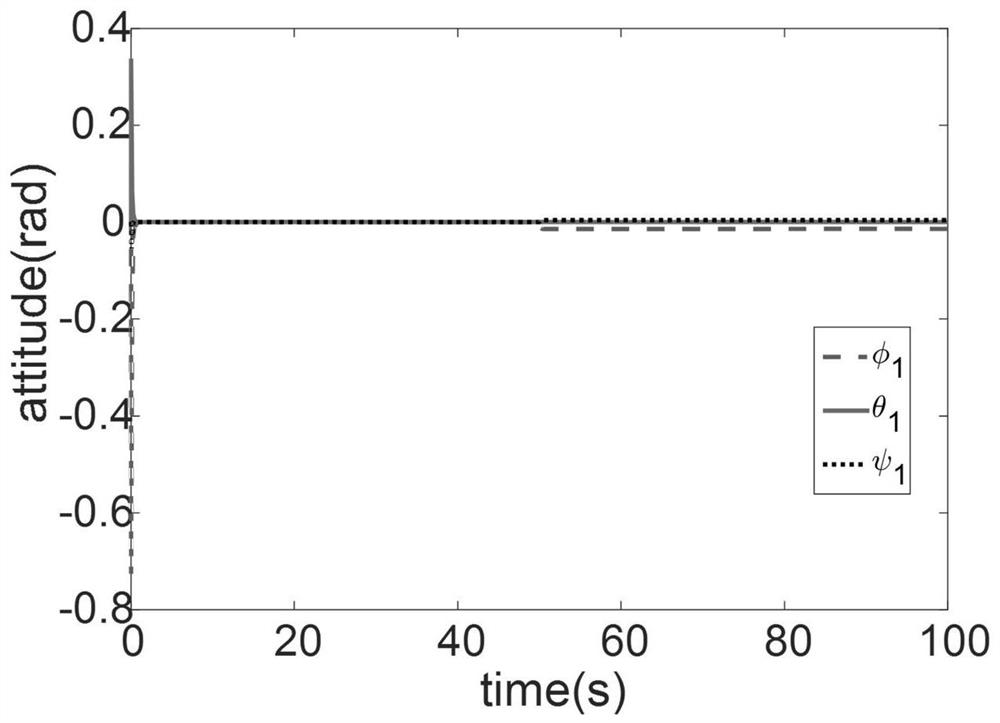
[0125] image 3 The tracking effect of the inner loop subsystem on the desired attitude is shown. Since the desired attitude angle given by the outer loop changes, there is a certain tracking error. Depend on Figure 3 It can be seen that the tracking error is small and the convergence speed is fast. In the case of partial failure of the actuator, the stability of the system and better control performance can still be guaranteed.
[0126] from Figure 4 , 5, 6, it can be seen that even in the case of the fail...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com