Eight-degree-of-freedom disc type brushless motor driven quadruped robot
A quadruped robot and brushless motor technology, applied in the field of robots, can solve the problems of weakened power carrying capacity, heavy robot weight, and weak load capacity, etc., to achieve a stable and lightweight fuselage frame, a large proportion of driving mass, and reduced The effect of leg deformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
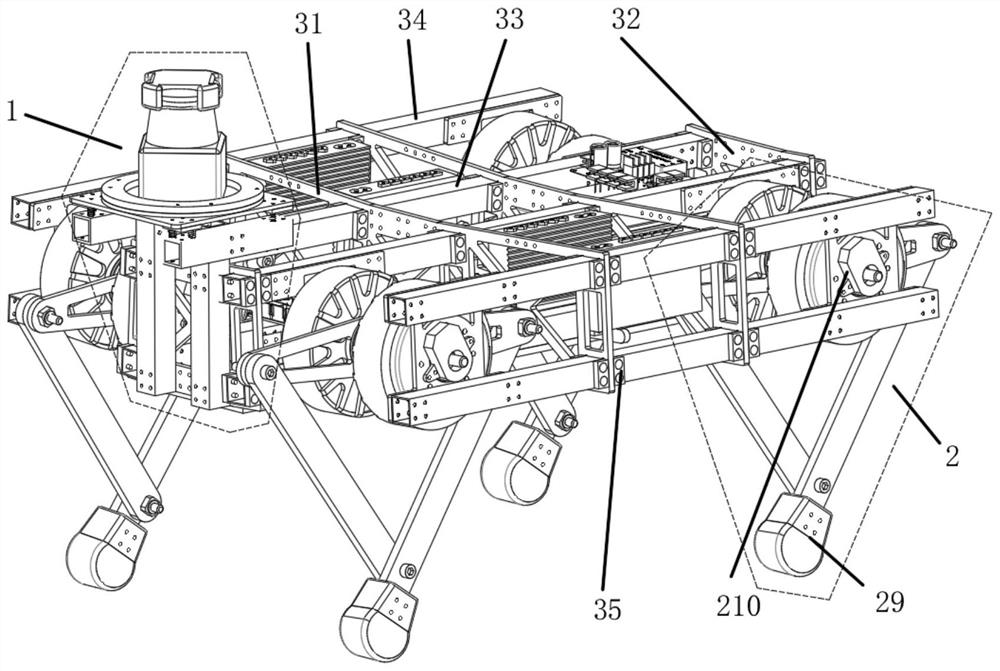
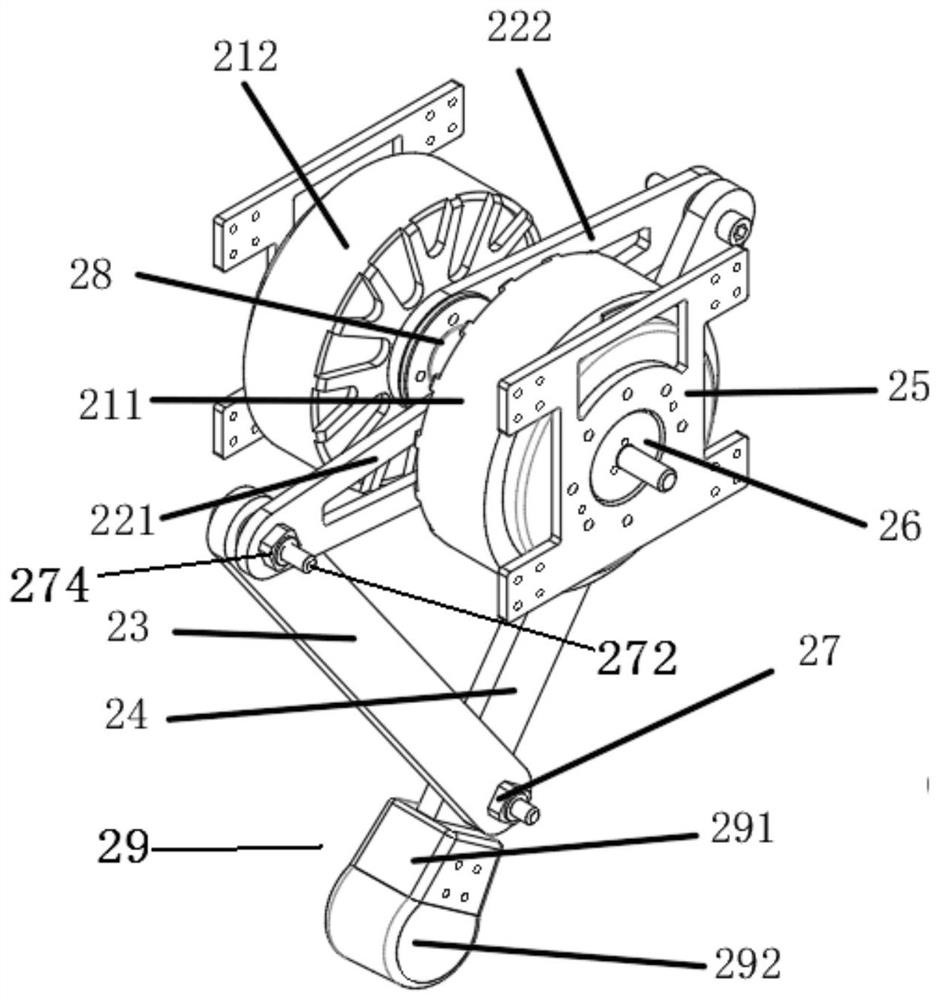
[0078] Such as figure 1 As mentioned above, this embodiment provides an eight-degree-of-freedom four-legged exploration and obstacle-surpassing robot, which has the operating functions of surveying the environment and autonomous walking, jumping, and uphill and downhill, and four legs with two degrees of freedom each are set on the frame structure The internal structure 2 simplifies the structure of the robot while maintaining the flexibility of movement.
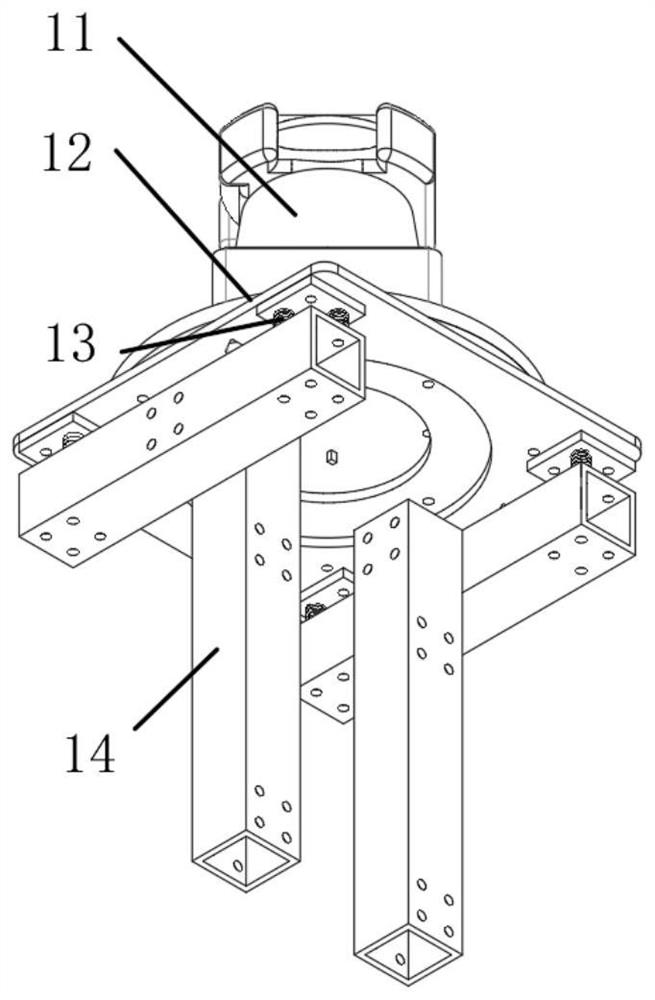
[0079] The overall structure of the eight-degree-of-freedom four-legged exploration obstacle-surpassing robot is as follows: figure 1 As shown, it includes: robot laser radar component 1, leg structure 2, fuselage 3 and electronic control system 4, etc., wherein the fuselage 3 is a rectangular frame structure, which is used for fixing the motor, erecting the radar, processing system, and motor control system. , power supply, etc. provide space, and the laser radar component 1 is consolidated with the short plate-shaped bea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com