A real-time positioning system and method for roadway excavation equipment based on multi-sensor fusion
A multi-sensor fusion, real-time positioning technology, applied in radio wave measurement systems, instruments, measurement devices, etc., can solve the problems of inability to obtain all the pose parameters of the fuselage, inability to realize intelligent excavation, inaccurate measurement results, etc. Simple structure, high reliability, and complete body positioning information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0067] see Figure 1 to Figure 3 , a multi-sensor fusion real-time positioning system and method for roadway excavation equipment, this embodiment is applied to real-time positioning of excavation equipment in coal mine roadways.
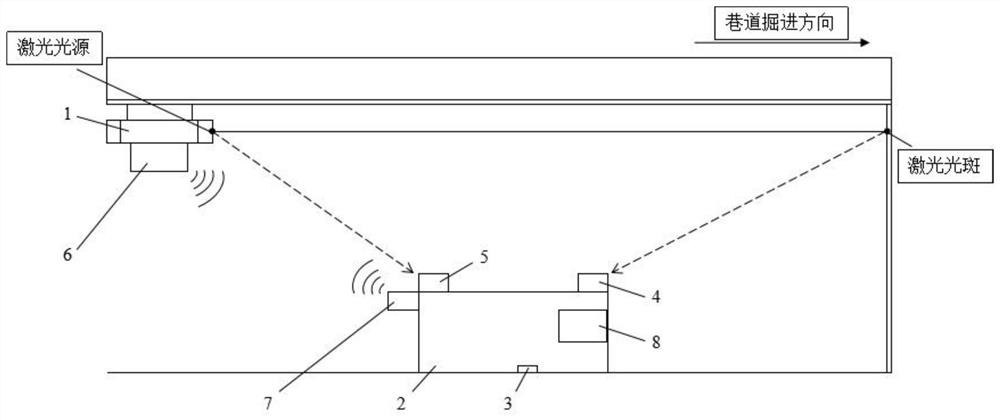
[0068] see figure 1 , a multi-sensor fusion real-time positioning system for roadway excavation equipment, including laser transmitter 1, excavation equipment 2, inertial unit 3, front camera 4, rear camera 5, radar transmitter 6, radar receiver 7 and industrial computer 8;
[0069] The laser transmitter 1 is installed on the roof of the coal mine roadway, and emits a pointing laser along the roadway excavation direction to form a laser spot on the excavation working surface; the excavation equipment 2 is provided with an inertial unit 3, which measures the fuselage of the excavation equipment 2 relative to the ground level. pitch angle and roll angle; the front camera 4 is installed on the front end of the fuselage of the excavation equipment 2, w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com