Vision based garbage sorting robot
A technology for garbage sorting and robotics, applied in sorting, manipulators, program-controlled manipulators, etc., which can solve problems such as low efficiency, sharp increase in the labor of cleaners, and complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
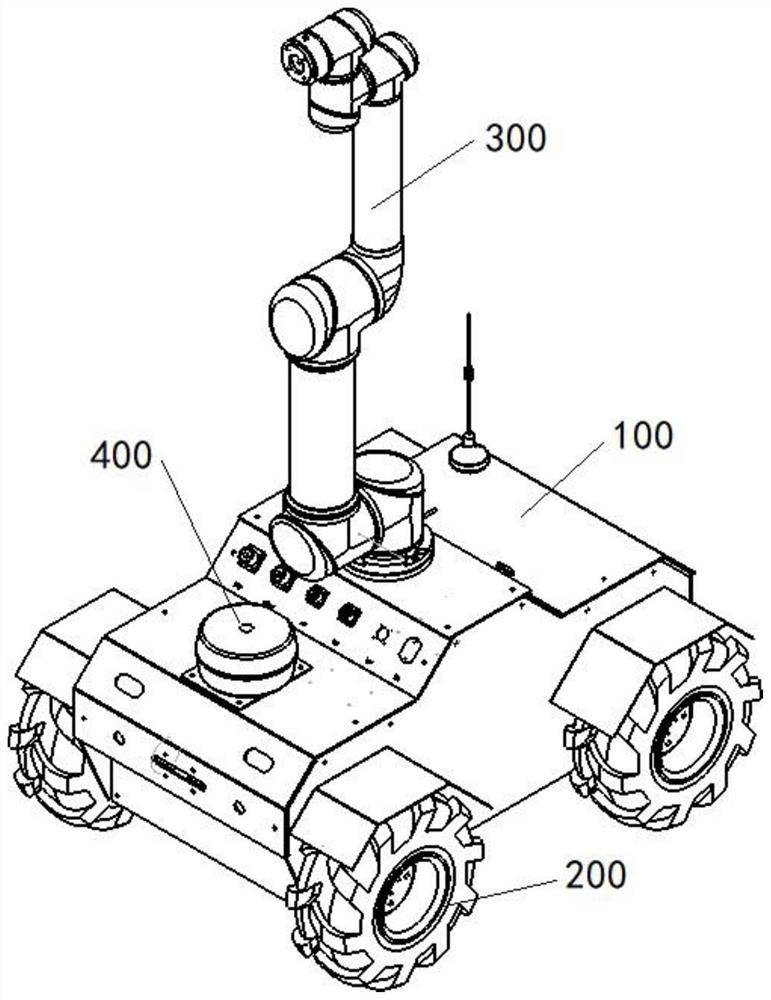
[0021] A vision-based garbage sorting robot includes a vehicle body 100 and a control system; a group of driving devices 200 are provided at the bottom of the vehicle body 100; a mechanical arm 300 and an image acquisition device 400 are provided on the vehicle body 100; the control system includes sensors, Controller, communication module and power module.
[0022] The driving device 200 includes two pairs of differential wheels arranged on both sides of the vehicle body 100, each pair of differential wheels is driven by a DC servo motor; the rotating shaft of the DC servo motor is connected to the transmission shaft of one of the wheels through a coupling ; The transmission shafts of the two wheels on the same side are connected through a synchronous pulley and a synchronous belt.
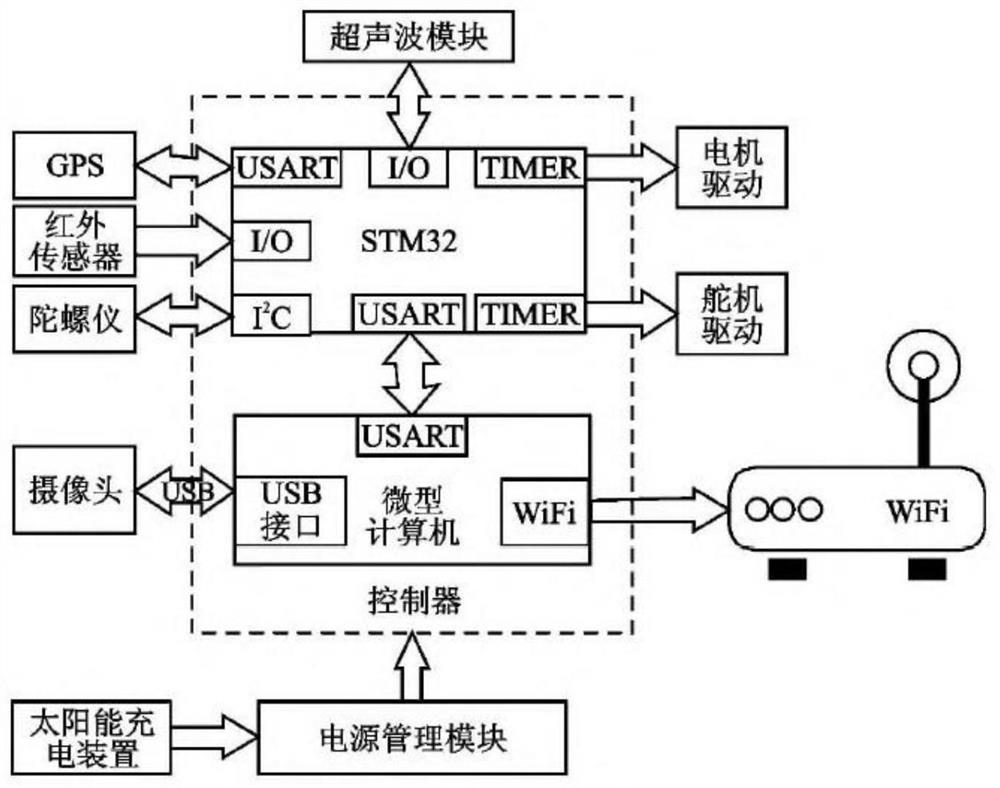
[0023] The image acquisition device 400 is a camera; the mechanical arm 300 is a six-axis articulated robotic arm; the controller includes an industrial computer and a motor driver; the sensor in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com