AUV integrated navigation method and system based on M estimation
An integrated navigation system and integrated navigation technology, applied in the field of AUV integrated navigation based on M estimation, can solve the problems of state estimation accuracy decline, cooperative navigation algorithm positioning error divergence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
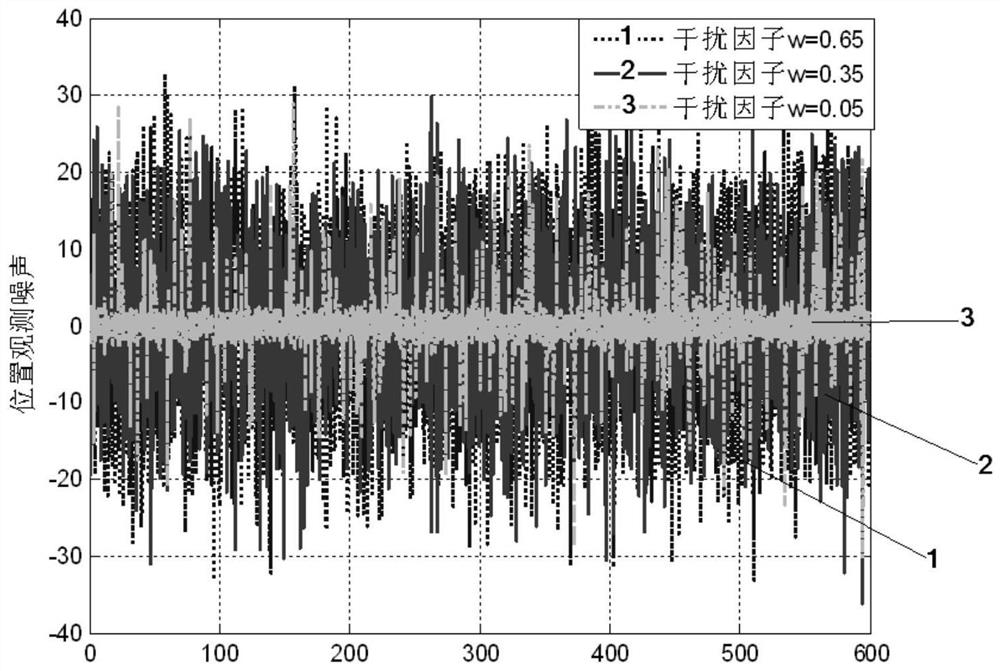
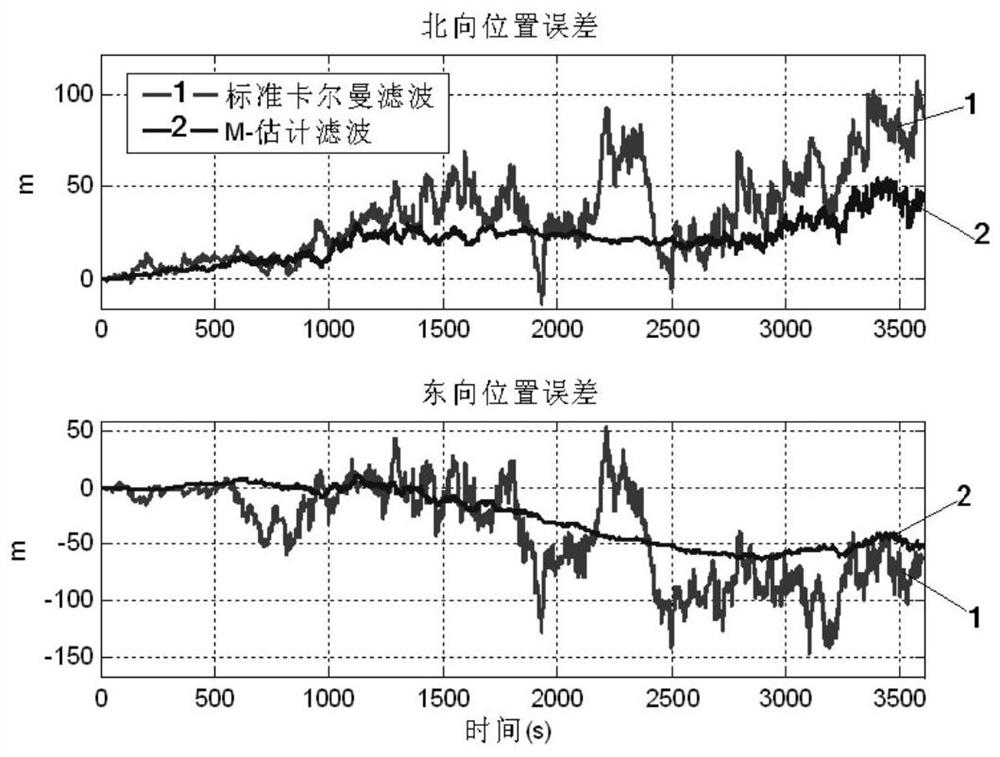
[0231] To verify the effectiveness of the M estimation algorithm under different conditions of interference factors, set the specific parameters of SINS in the integrated navigation system as accelerometer zero bias and gyro drift to be 5×10 -4 g,0.1° / h, the noise is 10 -6 g, 0.001° / h, the measurement error of USBL is 0.5% slant distance, the measurement noise of USBL is non-Gaussian, that is, it obeys the mixed Gaussian distribution, and compares the filtering of M estimation filter and standard Kalman filter under different conditions of interference factors in the mixed Gaussian distribution Effect. Here the interference factor is equal to 0.05, the standard deviation of interference distribution is equal to 100, and the simulation time is 3600s. The position error, velocity error, and attitude error of the SINS / USBL integrated navigation system based on the measurement noise mixed Gaussian distribution are simulated and verified. The change curve is as follows: image 3 ,...
Embodiment 2
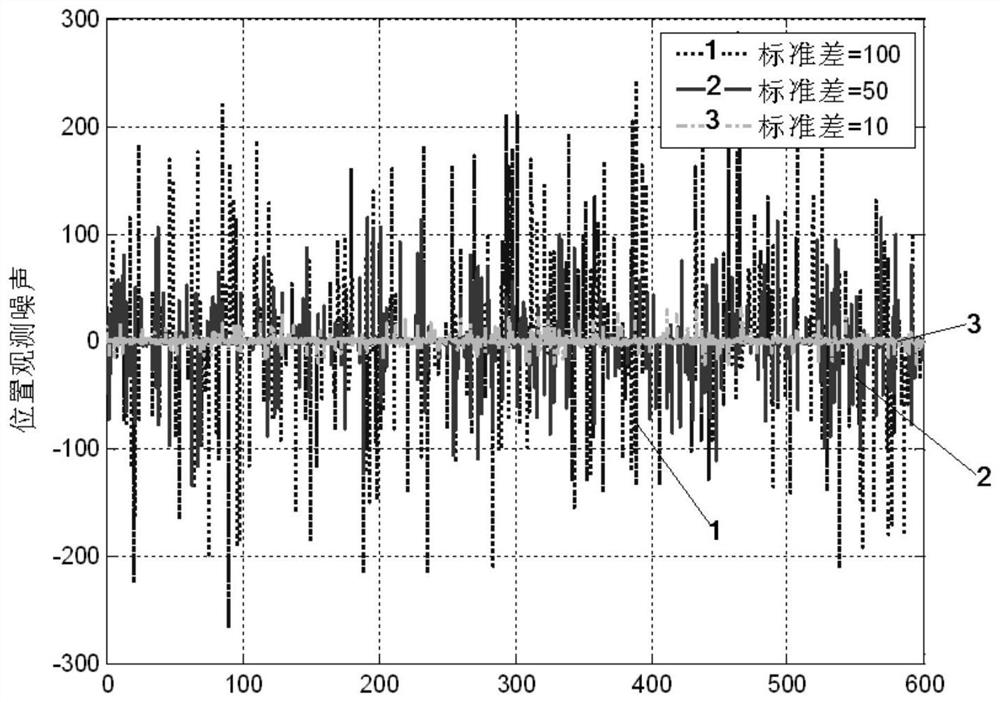
[0235] To verify the validity of the M estimation algorithm under different conditions of standard deviation, this section analyzes and compares the M estimation filter with the standard Kalman filter under the condition that the measurement noise obeys the mixed Gaussian model with different standard deviations. Compared with the mixed Gaussian distribution in 3.2 where the interference factor is equal to 0.35 and the standard deviation is equal to 100, the control variable method is used here, the fixed interference factor is equal to 0.35, and the standard deviation is set to 50. The simulation time is 3600s. The position error, velocity error, and attitude error of the SINS / USBL integrated navigation system based on the mixed Gaussian distribution of measurement noise are simulated and verified. The change curves are as follows: Figure 9 , Figure 10 , Figure 11 shown. The specific navigation parameters obtained from the above simulation are used for RMS value statisti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com