Tennis ball picking robot for physical training
A technology of sports training and robotics, which is applied in the field of sports training equipment, can solve the problems of long time for picking up tennis balls, the waist injury of the staff, and difficulty in forming the picking efficiency, so as to achieve the effect of improving picking efficiency and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Embodiments of the present invention will be described below with reference to the drawings. In the process, in order to ensure the clarity and convenience of illustration, we may exaggerate the width of the lines or the size of the constituent elements in the diagram.
[0029] In addition, the following terms are defined based on the functions in the present invention, and may be different according to the user's or operator's intention or practice. Therefore, these terms are defined based on the entire content of this specification.
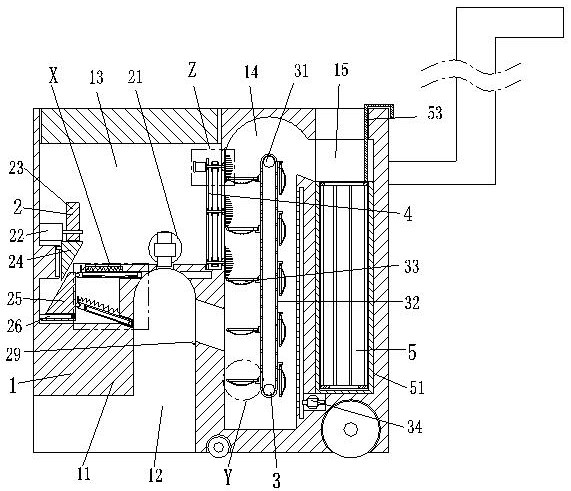
[0030] Such as Figure 1 to Figure 5 As shown, a tennis ball picking robot for sports training includes a moving frame 1, a suction device 2, a conveying device 3, a cleaning device 4 and a placing device 5, the left end of the moving frame 1 is equipped with a suction device 2, and the moving frame 1 The middle part is equipped with conveying device 3, and the left side of conveying device 3 is provided with cleaning device 4, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com