Four-rotor aircraft robust tracking control method based on iterative learning
A quadrotor aircraft, tracking control technology, applied in the field of robust tracking control of quadrotor aircraft based on iterative learning, to achieve the effect of improving the weight update rules and training process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0047] A robust tracking control method for a quad-rotor aircraft based on iterative learning includes the following steps:
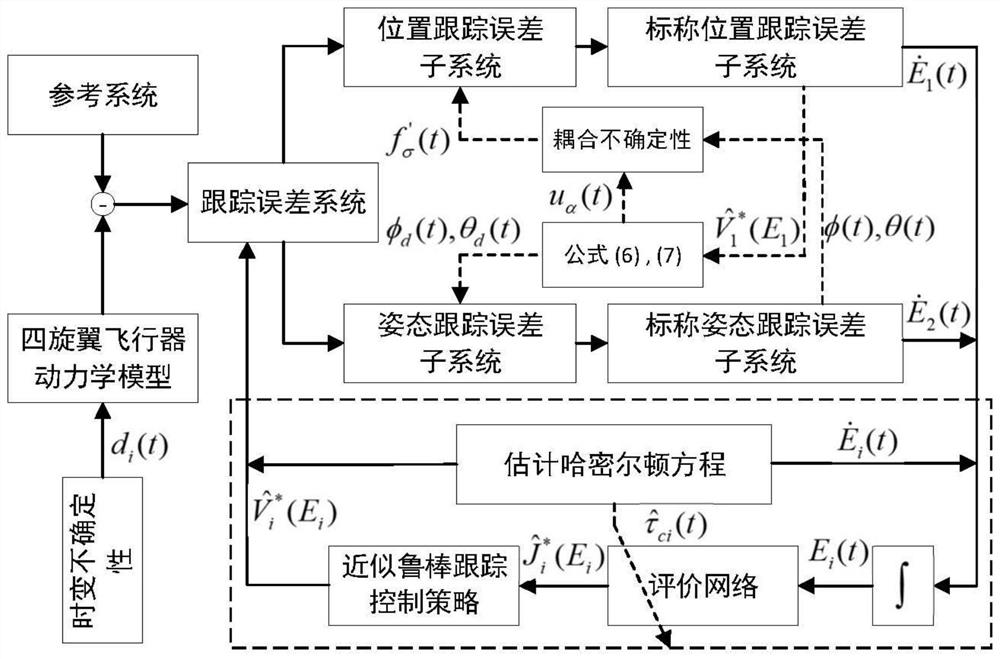
[0048] Step 1) Analyze the dynamic differential equation of the quadrotor with time-varying uncertainty, and establish the tracking error model of the quadrotor, including the position tracking error subsystem and the attitude tracking error subsystem;
[0049] Step 2) Obtain the state space model of the attitude tracking error subsystem, define the coupling uncertainty of the position tracking error subsystem, and establish the state space model of the position tracking error subsystem;
[0050] Step 3) Consider the time-varying uncertainty characteristics and the coupling uncertainty characteristics, and establish a cost function considering the coupling uncertainties for the nominal system of the position tracking error subsystem and the attitude tracking error subsystem; based on the cost function, the solution is obtained Optimal control rate;
[0051] Tha...
Embodiment 2
[0159] In order to enable those skilled in the art to better understand the present invention, the robust tracking control method of a quadrotor based on iterative learning will be described in detail below in conjunction with specific embodiments.
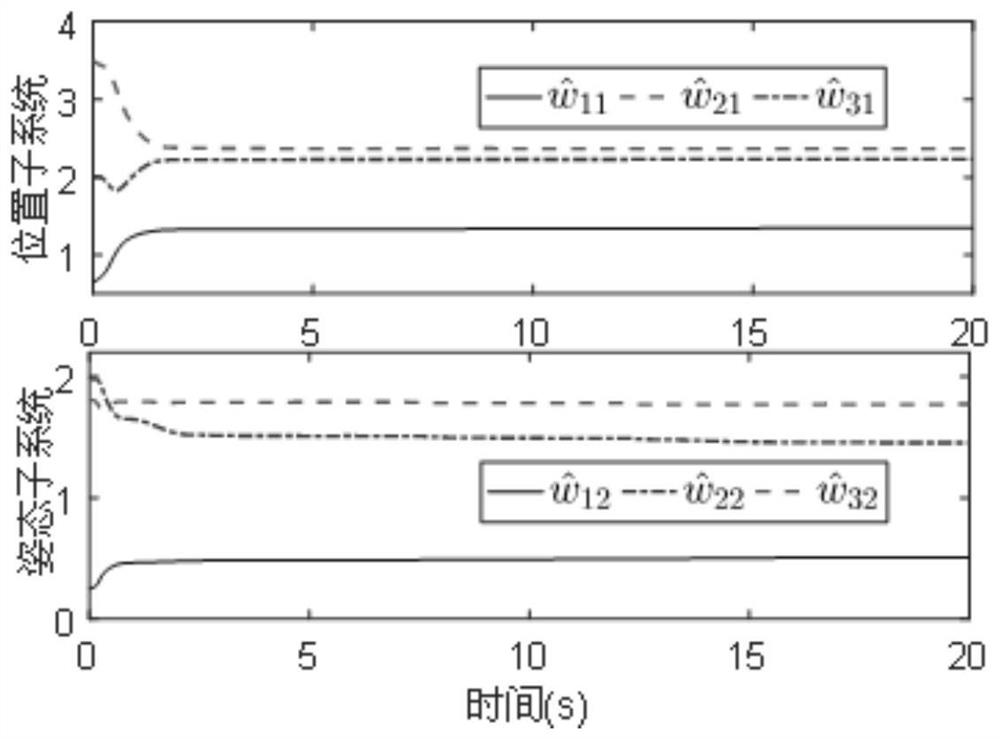
[0160] The main parameters of the quadrotor system are given as follows: Moment of inertia p 1 = P 2 =0.16N·m, p 3 =0.32N·m; lever arm length l=0.4m; moment coefficient c=0.05m; quadrotor mass m=2.33kg; acceleration of gravity g=9.8m·s 2 . k i ,i=1,,6 represents the air damping coefficient, and satisfies 0.007≤k 1 ,k 2 ,k 3 ≤0.013 and 0.0084≤k 4 ,k 5 ,k 6 ≤0.0156.
[0161] The nominal value of the air damping coefficient is set to k 1 =k 2 =k 3 = 0.01 and k 4 =k 5 =k 6 = 0.012. Since the x-, y-, and z-directions of the quadrotor are decoupled from each other in the position subsystem, the state sequence in the position tracking error subsystem can be adjusted to obtain Realize its decoupling representation in three directions, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com