Global navigation auxiliary method based on unmanned aerial vehicle shooting and semantic segmentation
A technology of semantic segmentation and navigation assistance, applied in navigation, surveying and mapping and navigation, navigation computing tools, etc., can solve problems such as low-speed automatic driving that cannot meet the off-road navigation requirements of engineering vehicles, impossible coverage by map providers, and complex terrain in outdoor venues, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0039] The present invention will be further described in detail below in conjunction with the drawings.
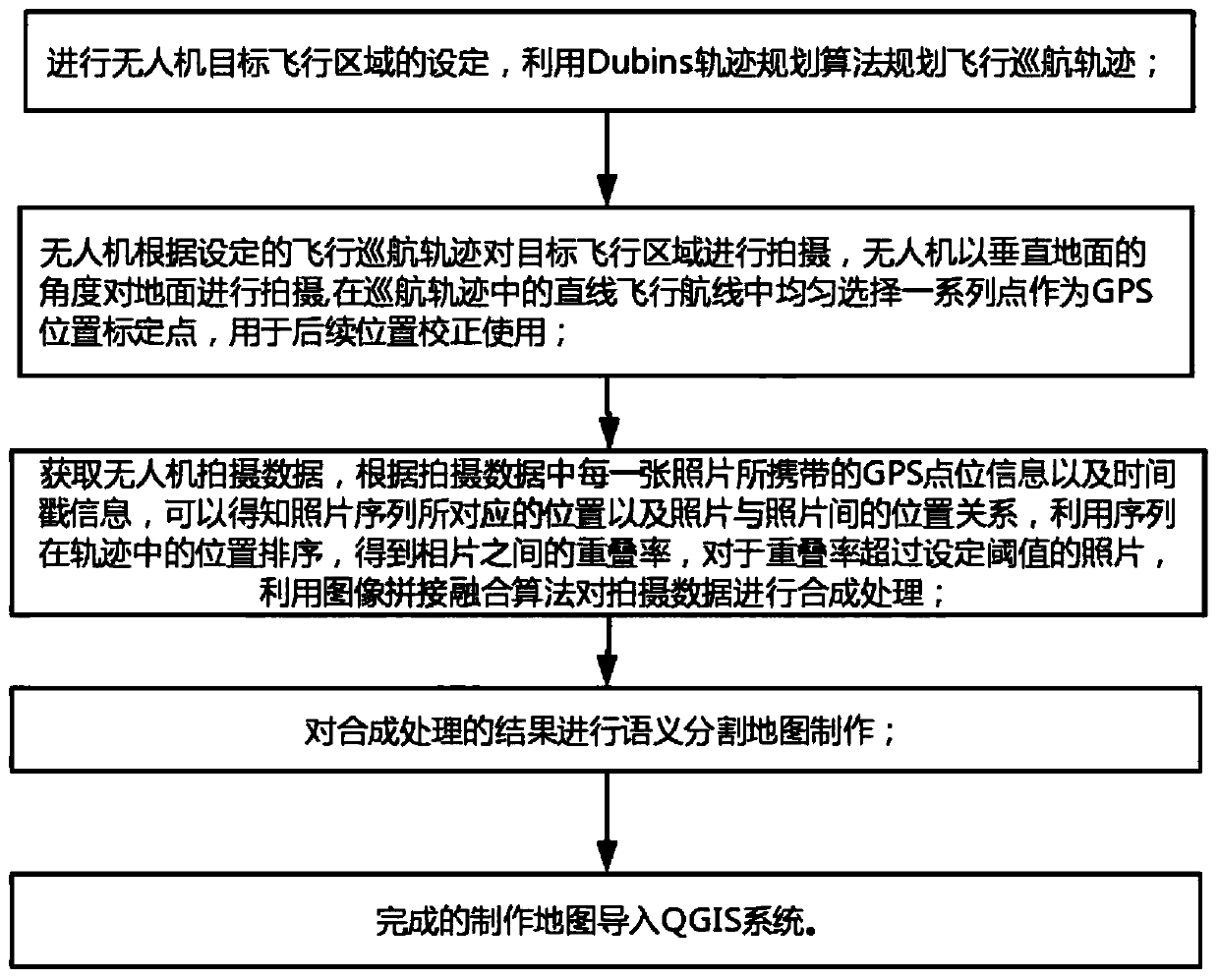
[0040] A global navigation assistance method based on UAV shooting and semantic segmentation, such as figure 1 As shown, the package sets the target flight area of the UAV, and uses the Dubins trajectory planning algorithm to plan the flight cruise trajectory;
[0041] The drone shoots the target flight area according to the set flight cruise trajectory. The drone shoots the ground at an angle perpendicular to the ground, and evenly selects a series of points in the straight flight path in the cruise trajectory as GPS position calibration points. Used for subsequent position correction;
[0042] After the drone returns home, upload the information in the memory card it carries to the server to obtain the drone shooting data. According to the GPS point information and time stamp information carried by each photo in the shooting data, the photos can be known The position corre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com