Active-disturbance-rejection control method of multi-axis series mechanical arm
A technology of active disturbance rejection control and active disturbance rejection controller, applied in manipulators, program control manipulators, manufacturing tools, etc., can solve problems such as difficulty in establishing mathematical models, complex mechanical structures of manipulators, complex models, etc., and achieve good high-frequency The effect of flutter suppression ability and active anti-interference ability, fast response speed and strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
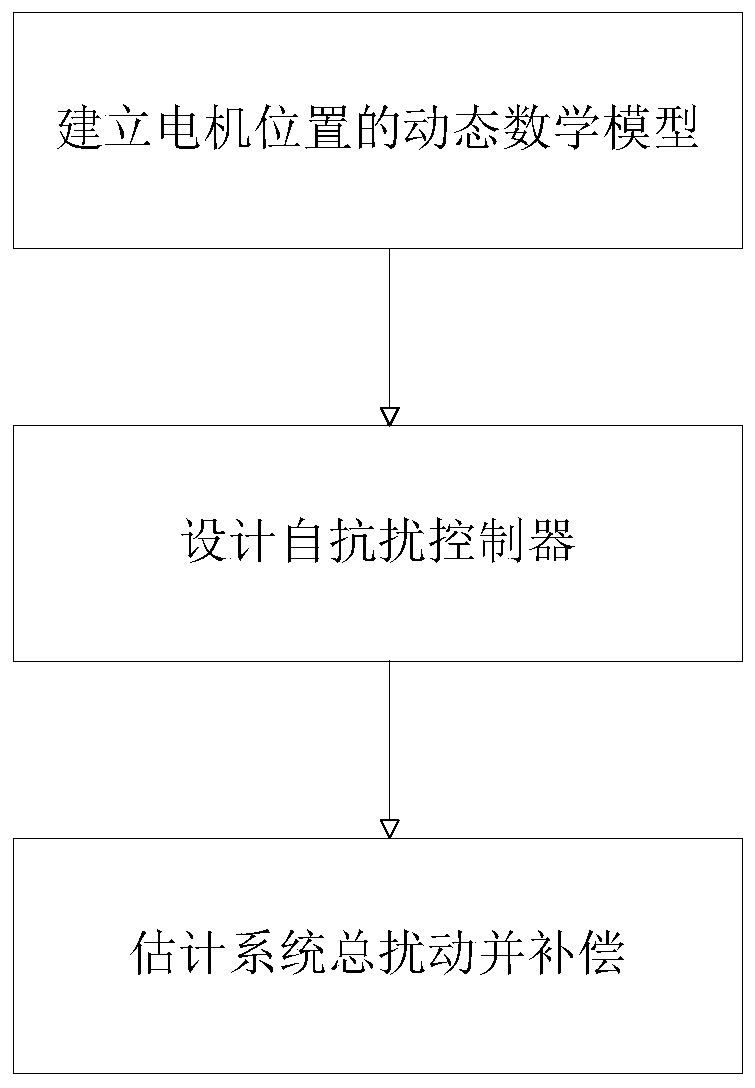
[0048] Such as figure 1 As shown in ~, this embodiment provides a technical solution: an active disturbance rejection control method for a multi-axis series manipulator, including the following steps:
[0049] S1: Establish a dynamic mathematical model of the motor position
[0050]Analyze the working circuit of the joint motor of the manipulator, establish the mathematical model of the motor according to the balance equation of the motor, and use the Laplace transform to obtain the transfer function between the output and input of the motor under zero initial conditions and the dynamic mathematical model of the motor position;
[0051] S2: Design ADRC
[0052] The ADRC controller is designed, and the nonlinear function is selected to construct the extended state observer and the nonlinear error feedback control law in the ADRC controller;
[0053] S3: Estimate the total disturbance of the system and compensate
[0054] The Kalman filter is introduced into the extended stat...
Embodiment 2
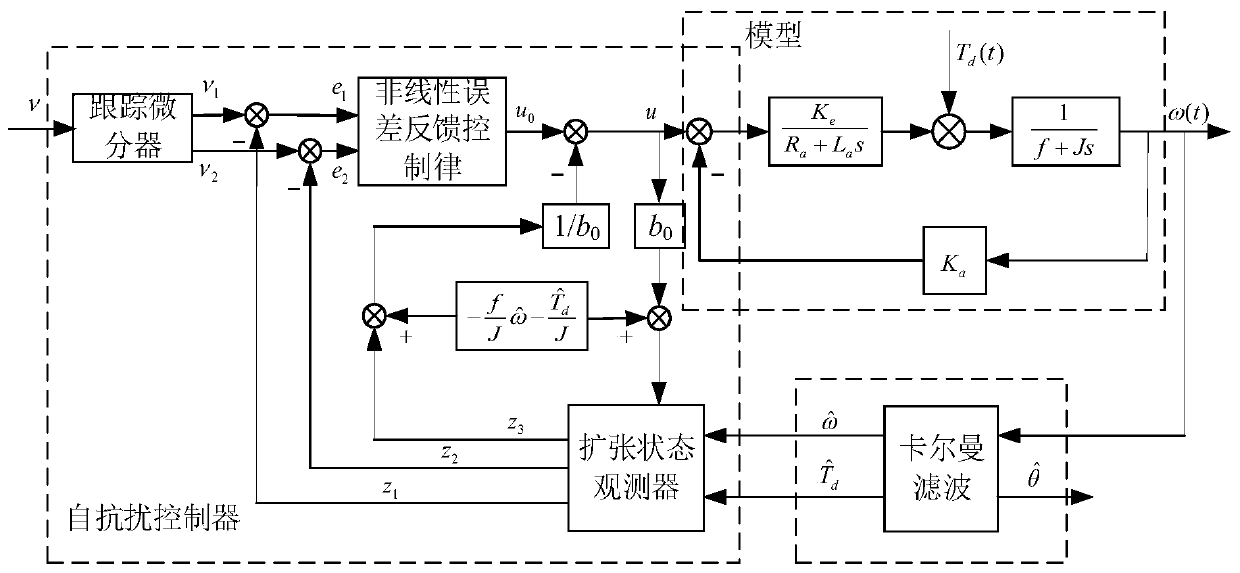
[0083] Such as figure 2 As shown, this embodiment proposes an active disturbance rejection control method for a multi-axis series manipulator, including the following steps:
[0084] The first step is to analyze the working circuit of the joint motor of the manipulator, establish the mathematical model of the DC torque motor according to the four balance equations of the motor, and use the Laplace transform to obtain the output ω and input u of the DC torque motor under zero initial conditions a A dynamic mathematical model of the transfer function between and the motor position;
[0085] In the second step, the components of ADRC are designed, including tracking differentiator, extended state observer, nonlinear error feedback control law and disturbance compensation device, and a new nonlinear function is selected to construct the extended state observer and Nonlinear error feedback control law;
[0086] The third step is to introduce the Kalman filter into the extended s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com