Track generation method and device for distributed positioning system
A positioning system and distributed technology, applied in positioning, measuring devices, radio wave measuring systems, etc., can solve the problems of non-constant target positioning error, failure to improve the overall positioning accuracy of the target, and achieve the effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
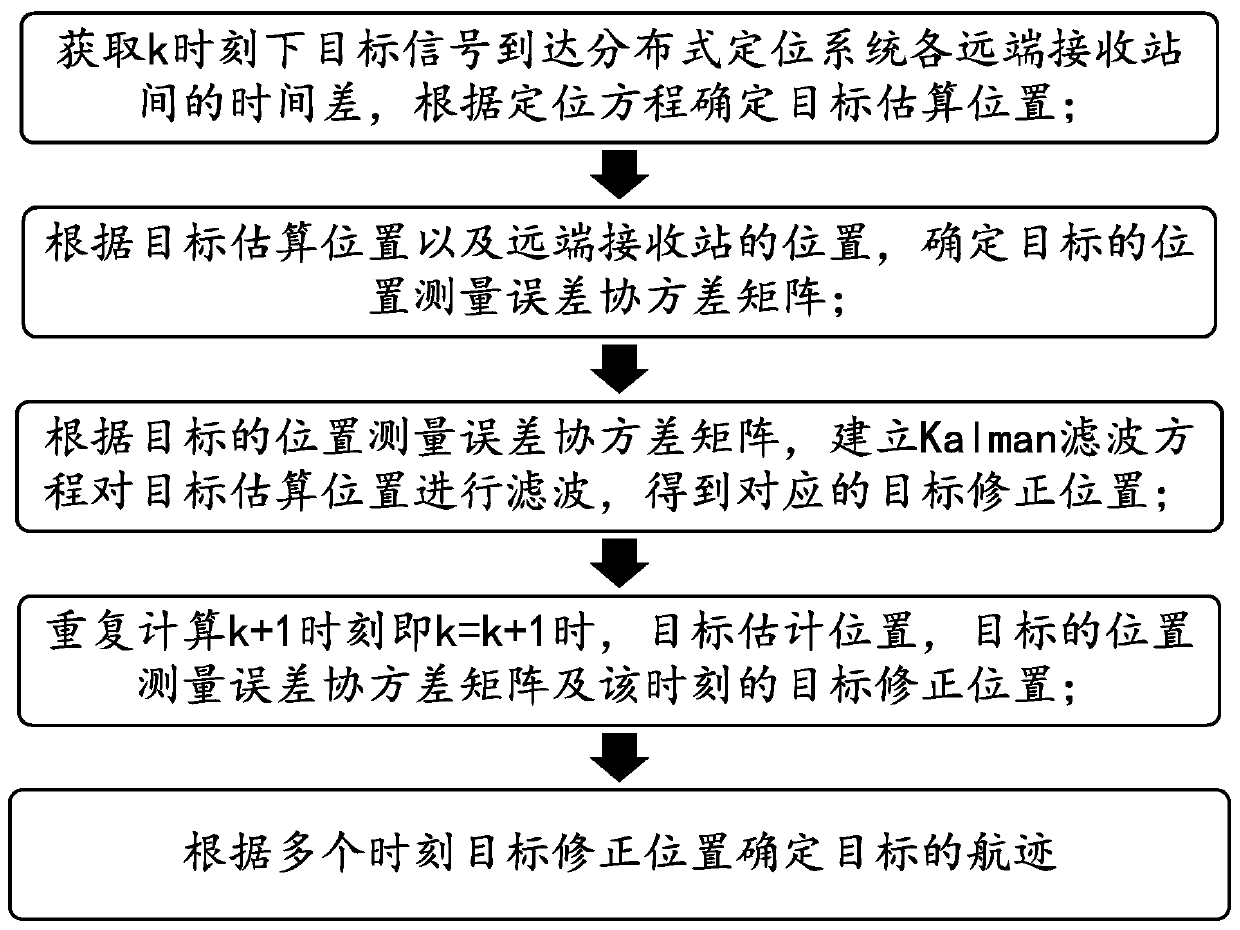
[0034] Such as image 3 As shown, a track generation method of a distributed positioning system of the present invention includes:
[0035] S1: Obtain the time difference between the arrival of the target signal at each remote receiving station at time k, and determine the estimated position of the target according to the positioning equation, specifically including:
[0036] First, the time it takes for the signal of interest to reach each remote receiving station is measured. Let the target position at time k be Z k , there are N remote receiving stations with known positions, and the position of the i-th remote receiving station is R i , the measured target signal arrival time at the i-th remote receiving station is TOA i ;
[0037] Secondly, calculate the time difference TDOA between the arrival of the target signal at the i-th and i+1 (i=1, 2, ..., N-1) remote receiving stations i,i+1 ,
[0038] TDOA i,i+1 =TOA i -TOA i+1
[0039] According to the positioning eq...
specific example
[0106] The specific example of the present invention according to above-mentioned track generating method is as follows:
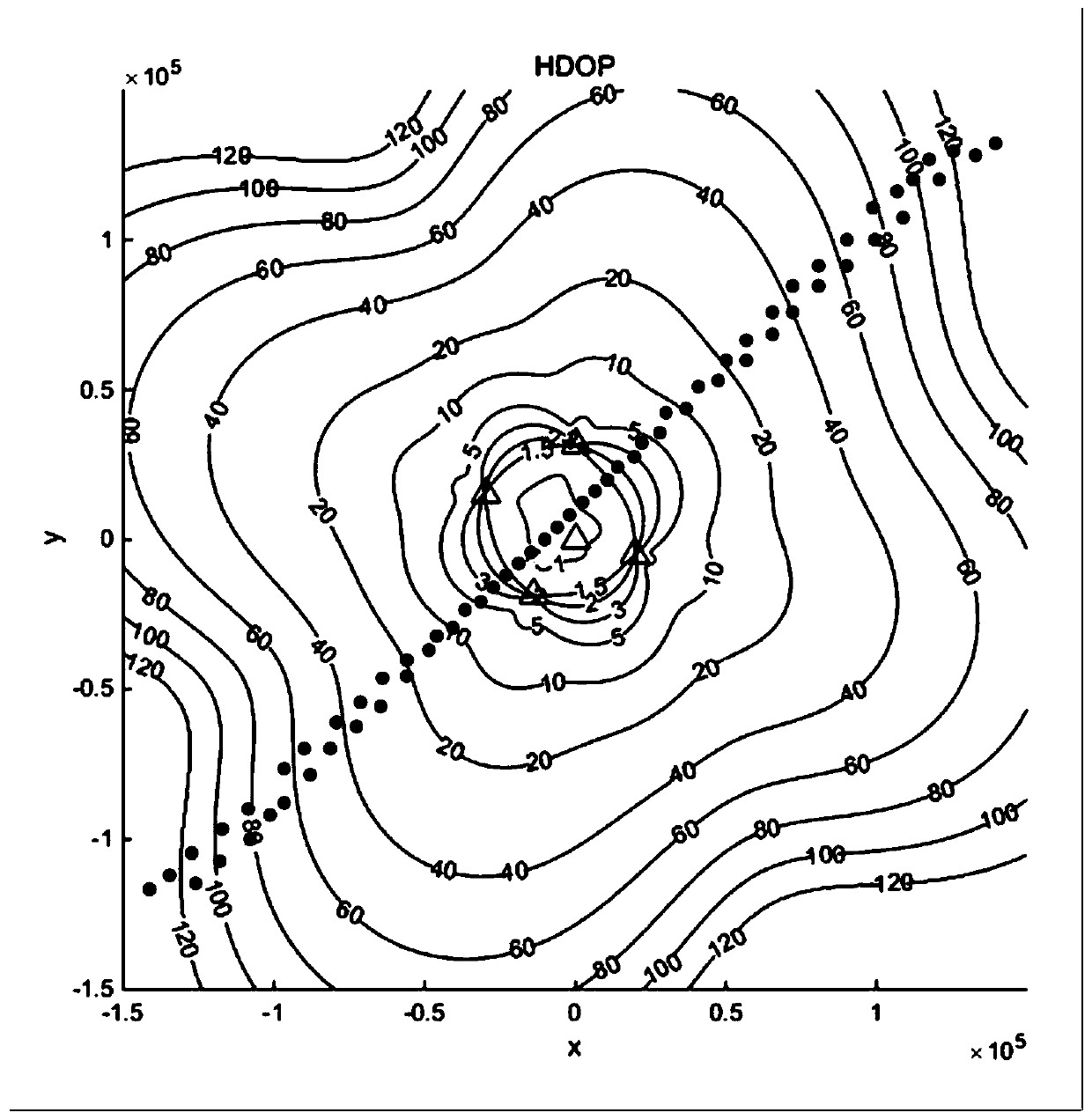
[0107] The specific process of locating airspace targets around the airport is as follows: Figure 4 shown, including:
[0108] The five remote receiving stations of the distributed positioning system receive the signals transmitted by the target, measure the arrival time of the signals at the five receiving stations, and send the measured signal arrival time data to the central processing station of the distributed positioning system.
[0109] The central processing station of the distributed positioning system calculates 4 time differences in total when the target signal arrives at the 5 remote receiving stations, 1 and 2, 2 and 3, 3 and 4, and 4 and 5, respectively. .
[0110] According to the time difference of the calculated signal arriving at the five remote receiving stations and the position coordinates of the five remote receiving stations, the ...
Embodiment 2
[0132] Considering that the aircraft is located in different areas, the trajectory generation process is different, so before the step of determining the estimated position of the target aircraft according to the time difference between the arrival of the target aircraft signal at each remote receiving station, it includes: according to the specific time of receiving the target aircraft signal A remote receiving station determines whether the target aircraft is located in an air zone or a ground zone. Specifically, the central processing station of the distributed positioning system judges the area where the target is located according to the specific receiving station that receives the target signal. Since there is a certain distance from the airport, the multiple remote receiving stations used to locate aircraft in the airspace around the airport cannot receive the positioning signals emitted by the aircraft on the airport scene. Therefore, if multiple remote receiving statio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com