
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Colonoscope handle operator for assisting doctor in colonoscopy
A colonoscopy and manipulator technology, applied in the field of endoscopic surgery medical robots, can solve the problems of high risk, difficult operation, full of folds in the intestinal wall and abdomen, etc., and achieve the effect of accurate rotation angle, good effect, and avoidance of injury.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
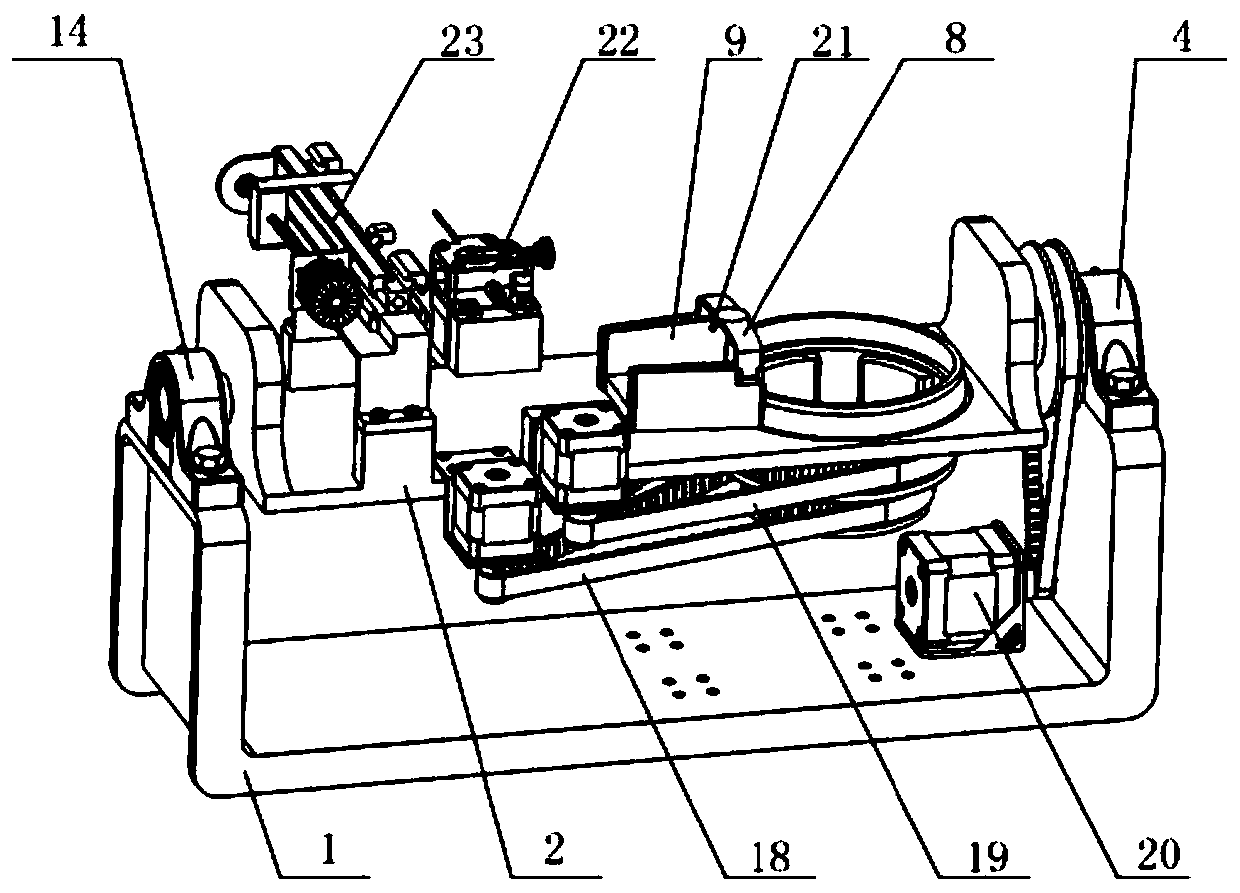
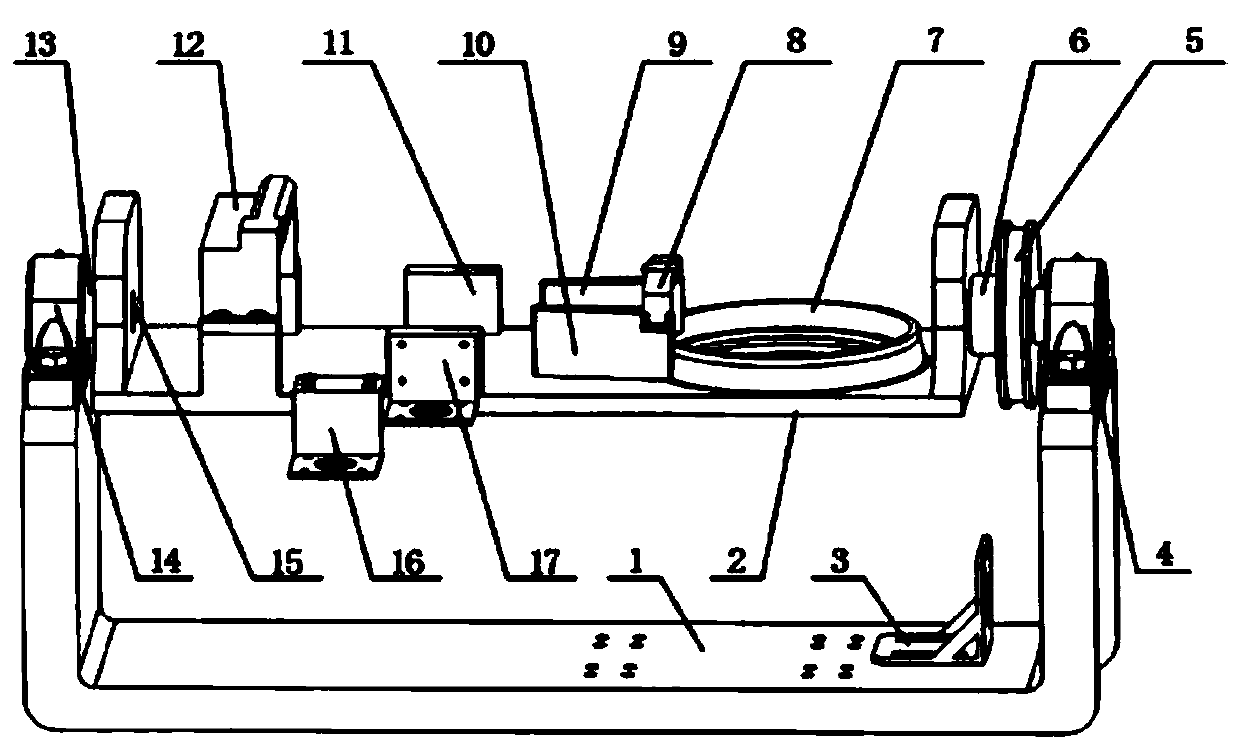
[0027] Combine below figure 1 , 2 , 3, 4, 5, 6, 7, 8, and 9 illustrate this embodiment. The present invention relates to the field of endoscopic surgical medical robots, especially to the operation method for doctors to perform colon examination, including 1. base, 2. U-shaped support Plate, 3. Motor support plate IV, 4. Support seat II, 5. Big gear, 6. Solid shaft, 8. Buckle frame, 9. Handle fixed side plate I, 10. Handle fixed side plate II, 11. Motor Support plate III, 12. small support frame 13. hollow shaft 14. support seat, 16 motor support plate I, 17. motor support plate II, 18. dial driving mechanism I, 19. dial driving mechanism II, 22. biopsy 23. The closing mechanism of the biopsy forceps, the device has a simple structure, and the device can help the doctor to complete the work of colon inspection and polyp removal by driving the motor. Preparations Put the tip 59 of the colonoscope through the small through hole 15, place the handle 49 of the colonoscope in the...
specific Embodiment approach 2
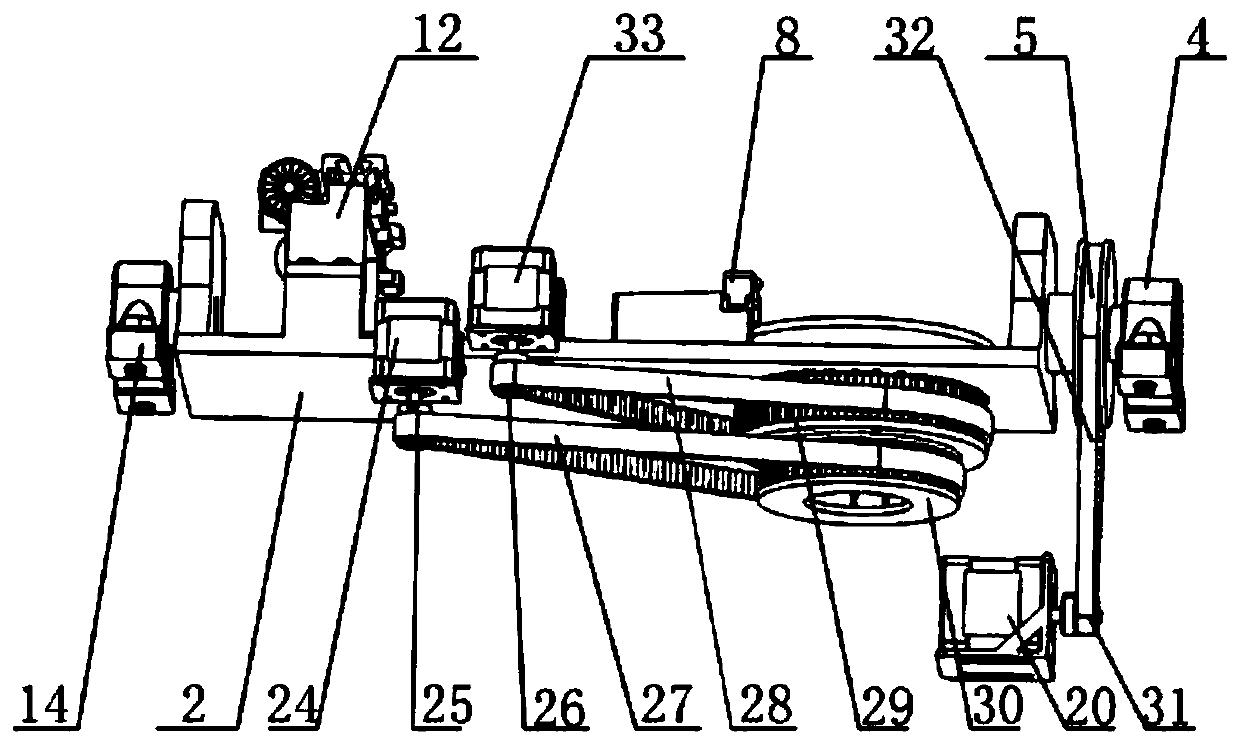
[0029] Combine below figure 1 , 2 , 3, 4, 5, 6, 7, 8, and 9 illustrate the present embodiment, and the present embodiment further describes the first embodiment, the gear teeth of the pinion I25 on the motor I24 shaft in the dial drive mechanism I18 and the synchronous belt I27 The teeth of the dial wheel housing II30 mesh with the teeth of the synchronous belt I27. The meshing relationship of the various parts of the dial driving mechanism II19 is exactly the same as that of the dial driving mechanism I18. During the colon inspection operation, the doctor, Observe the position of the colonoscope tip 59 in the human intestine in the monitor, and drive the rotation direction and rotation angle of the motor I24 and the motor II33 to complete the operation of the rotation direction and rotation angle of the large dial 50 and the small dial 51, so that The tip 59 of the colonoscope rotates to an ideal angle. During the colon inspection process, if a polyp is encountered on the si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com