Outdoor mobile chassis for mobile robot
A mobile robot and mobile chassis technology, applied in the field of mobile robots, can solve the problems of poor shock resistance and insufficient stability of the mobile chassis, and achieve the effects of increasing flexibility, improving stability, and improving shock resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
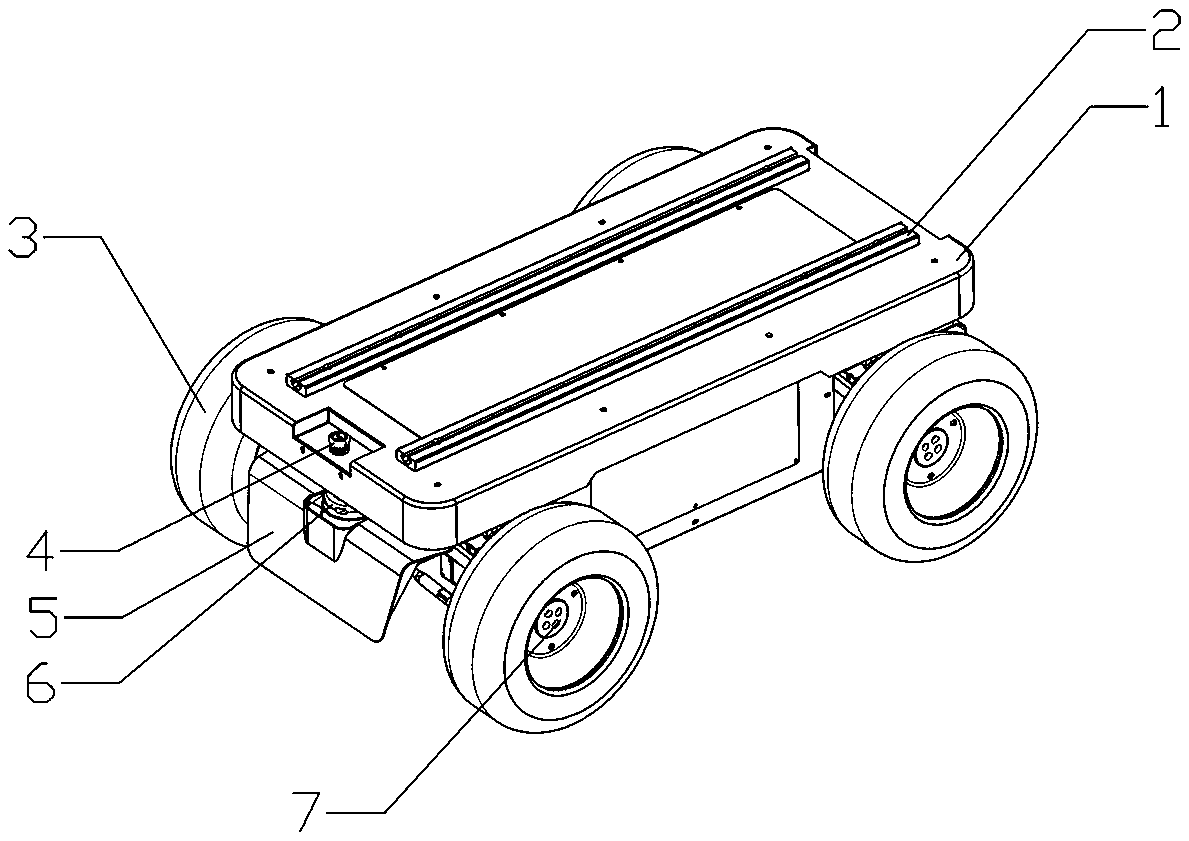
[0037] see figure 1 , an outdoor mobile chassis for a mobile robot, comprising a chassis body 1, four mobile wheels 3, four reduction motors 11, a front suspension mechanism and a rear suspension mechanism, the front suspension mechanism and the rear suspension mechanism The structure of the institution is the same.
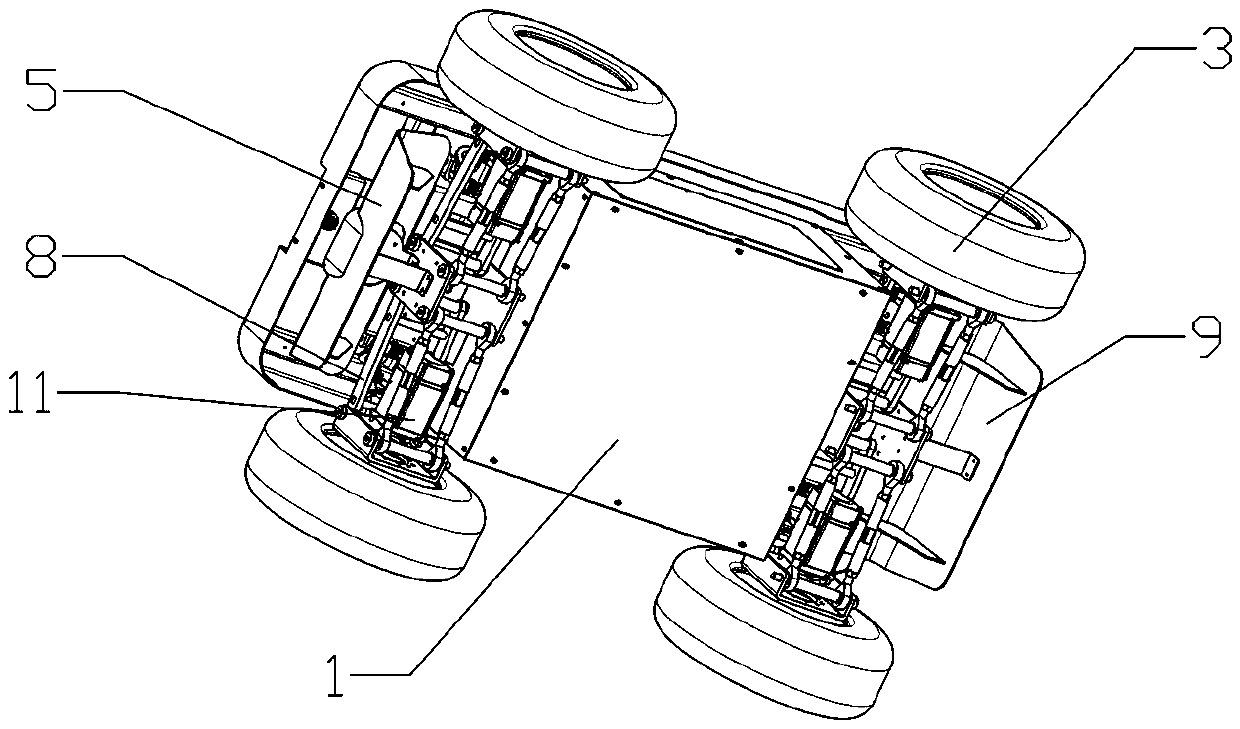
[0038] see figure 2 , the output shaft of each reduction motor 11 is fixedly connected to a corresponding moving wheel 3 through the hub connector 7 .
[0039] see Figure 4 , the suspension mechanism includes a pair of shock-absorbing adjustment suspension mechanisms with the same structure, an intermediate bracket 14 and a connecting frame 13. see image 3 , the middle bracket 14 is an inverted U-shaped bracket.
[0040] see Figure 4 , The shock-absorbing adjustment suspension mechanism includes a shock absorber 82, a pendulum mechanism and an adjustment rod mechanism. The swing bar mechanism comprises a pair of swing bars 83, a pair of connecting post...
Embodiment 2
[0049] see figure 1 , the top surface of the chassis body 1 is a plane, and a pair of guide rails 2 are fixedly installed on the top surface of the chassis body 1 along the length direction. see Figure 7 , a pair of guide rails 2 are mounted with a mechanical arm mounting plate 15 through sliding fit, and a mechanical arm 16 is fixedly installed on the mechanical arm mounting plate 15 . The end of the mechanical arm 16 is connected to the gripper 19 through the gripper connector 17 , and a visual sensor 18 is installed on one side of the gripper 19 . The mechanical arm 16 is used to control the spatial position and posture of the gripper 19, the gripper 19 is used to grasp and operate the object, and the visual sensor 18 is used to acquire the spatial position coordinates of the object. Under the more complex terrain outdoors, the four moving wheels 3 receive the active force from the uneven ground, and transmit the active force to the shock absorber 82 through the motor mo...
Embodiment 3
[0051] see Figure 8 , On the guide rail 2, an installation backing plate 20 is movably fitted, and the carrying basket 21 is fixedly installed on the installation backing plate 20. When it is necessary to carry the picked fruit in the orchard, the orchard terrain is poor in flatness, and the four mobile wheels 3 of the outdoor mobile chassis receive the support force from the ground, and the support force passes through the motor mounting bracket 85 and the U-shaped fixing frame in turn. 84 is transmitted to the shock absorber 82, and the shock absorber 82 adjusts the fluid in the damper to the damping corresponding to the terrain conditions according to the force received, and shrinks correspondingly, so that each independent suspension mechanism 8 has a corresponding The change of the shape, the change of this shape will make the four moving wheels 3 continue to be close to the ground, so that the posture of the chassis body 1 and the carrying basket 21 can still be kept st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com