Method for detecting moving state of obstacle in real time by mobile robot in environment
A mobile robot and mobile state technology, applied in the field of mobile robots, can solve the problems of expensive and difficult radar detection systems, and the inability to realize autonomous obstacle avoidance of mobile robots, so as to achieve the effect of enhancing flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0049] The invention discloses a method for real-time detection of the moving state of obstacles by a mobile robot in an environment. The mobile robot is controlled by a host computer, and the mobile robot can move autonomously to detect whether there is an obstacle in the front area and the moving state of the obstacle.
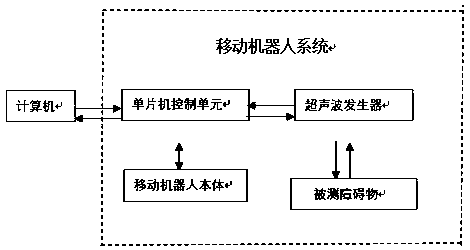
[0050] figure 1 It is a block diagram of the working principle of the real-time detection of the obstacle state by the mobile robot of the present invention. The computer is a host computer, and the computer first sends a control signal to control the mobile robot system, and communicates with the mobile robot system through a data acquisition card or in a wireless manner; the mobile robot The single-chip control unit accepts the control instructions of the host computer, controls the robot body to move and rotate autonomously, con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com