Variable-stiffness joint of robot
A technology of variable stiffness and robotics, applied in the field of robotics, can solve problems such as compliance is difficult to meet the requirements of human-machine integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The present invention will be described in further detail below in conjunction with the accompanying drawings.
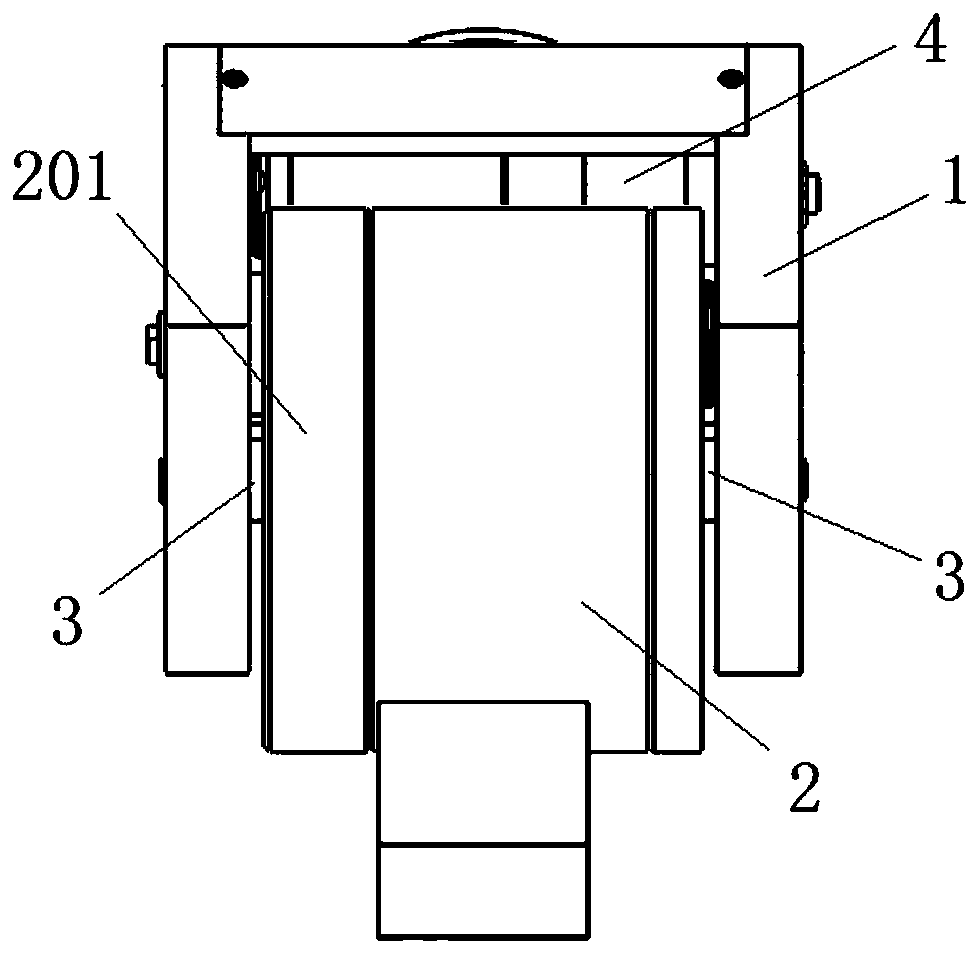
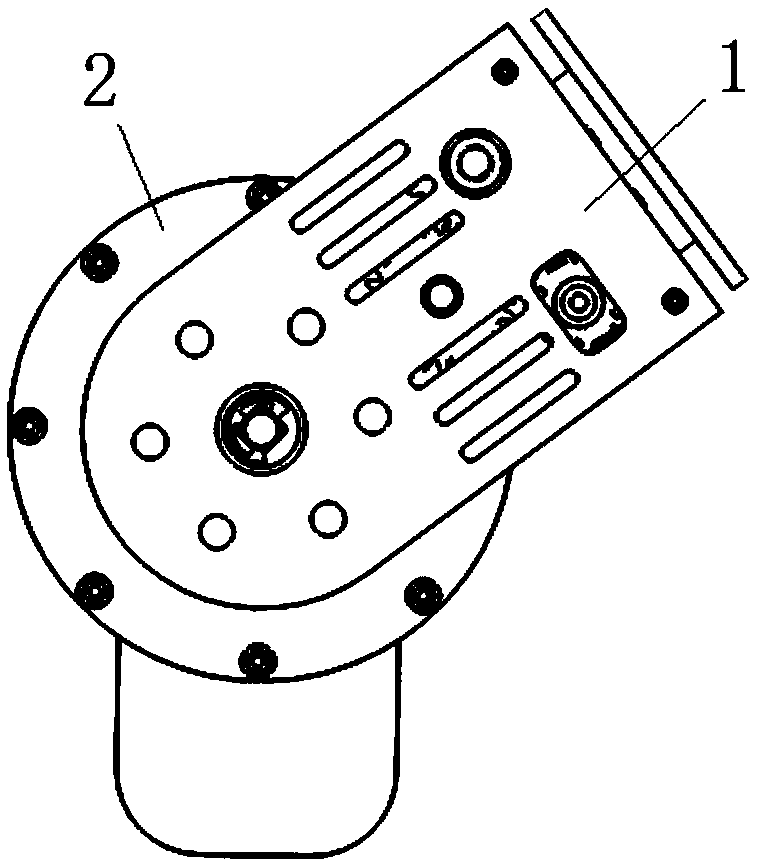
[0026] Such as Figure 1-7 As shown, the present invention includes a support frame 1, an adapter seat 2, a rotating drive structure, a leaf spring mechanism and a stiffness adjustment mechanism. In the mouth, and the two sides of the adapter seat 2 are rotatably connected to the side plates on both sides of the support frame 1 through the rotating shaft 3, the rotation driving mechanism is arranged on the support frame 1, and the adapter seat 2 passes through the The rotation driving mechanism drives the rotation, and the blade spring mechanism and the stiffness adjustment mechanism are all arranged in the adapter seat 2, such as Figure 5-7 As shown, the leaf spring mechanism includes a cam follower block 211 and two leaf springs 203. The cam follower block 211 is driven to move in the adapter seat 2 by the stiffness adjustment mechanism. Two cams 213 are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com