Grab-and-fit equipment for the production of pyrophyllite blocks for diamonds that can achieve compliance
A complete set of equipment and diamond technology, applied in the field of robotics, can solve problems such as workpiece damage, difficulty in completing work, and difficult control of internal support claws, and achieve the effects of reducing difficulty, high efficiency, and simple stress process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
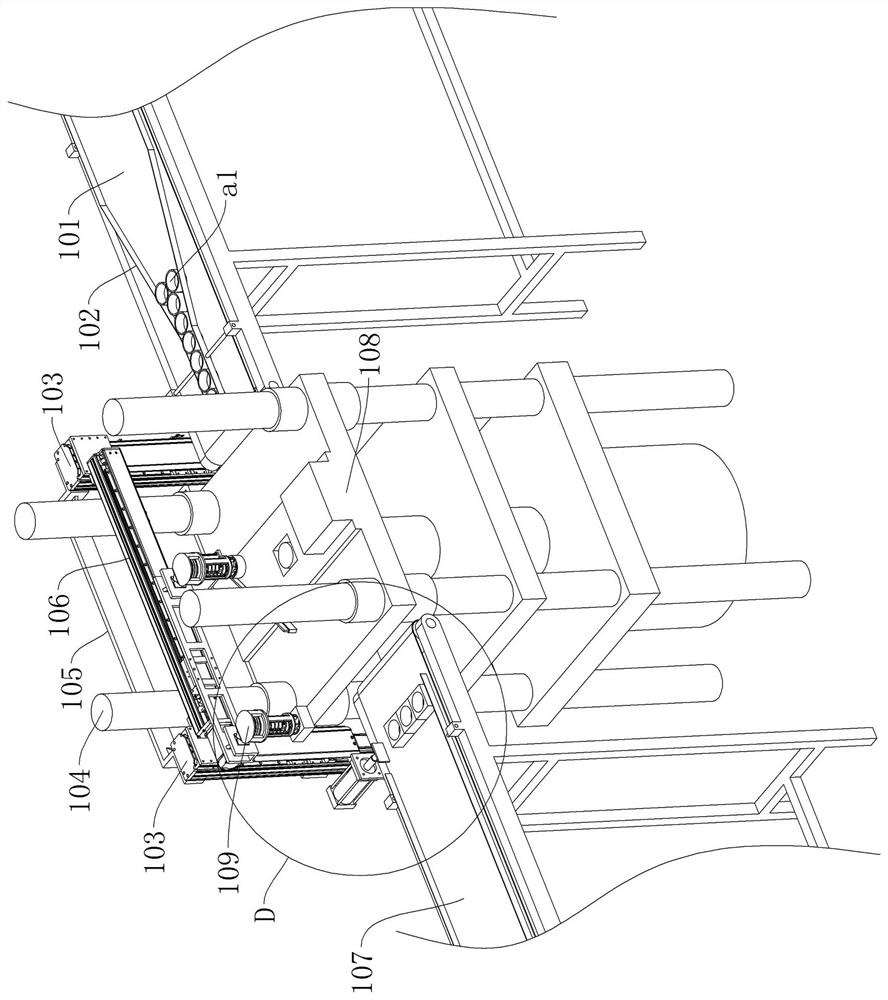
[0059] Embodiment one, see Figure 1-20 , the complete set of grabbing equipment for the production of pyrophyllite blocks for diamonds that can achieve smooth adjustment, including a feeding belt, a feeding belt arranged along a straight line, a grabbing and pressing machine between the feeding belt and the feeding belt;
[0060] The grabbing and pressing machine includes a working platform, which is installed on four columns; the lower mold assembly of the forming die is installed in the middle of the working platform, and a jacking hydraulic cylinder or air cylinder is arranged below the working platform It can drive the lifting of the lower mold assembly of the forming mold located in the middle of the working platform;
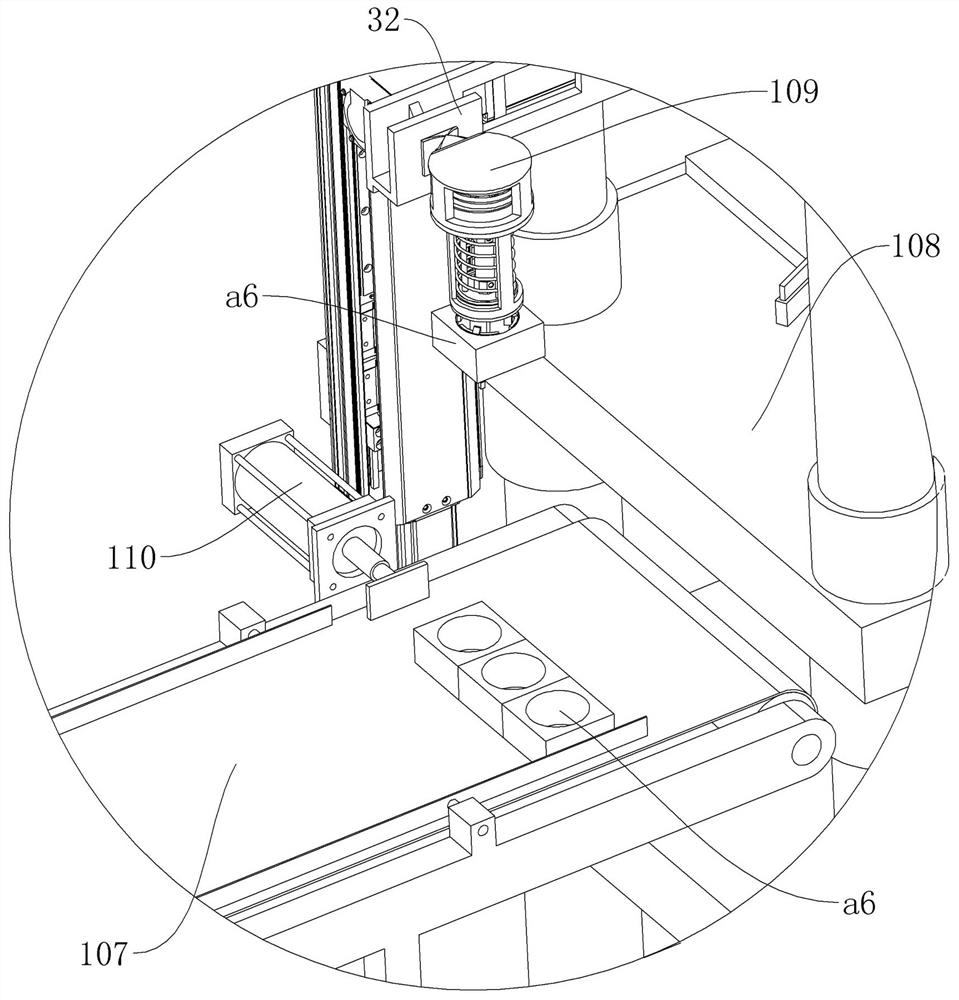
[0061] A workpiece moving device is installed on the side of the working platform. The workpiece moving device includes a vertical lifting linear module and a horizontal translation linear module. The fixed parts of the vertical lifting linear module are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com