Four-eye stereoscopic vision system global calibration method based on one-dimensional target rotating motion
A technology of binocular stereo vision and rotational movement, applied in the field of stereo vision, which can solve the problems of large measurement field of view limitations and cumbersome operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The implementation of the present invention will be described in detail below with reference to the drawings and examples, so as to fully understand and implement the implementation process of how to use technical means to solve technical problems and achieve technical effects in the present invention.
[0030] In this example, the experimental environment is provided by a helicopter research institute, and one of the rigid blades of the helicopter is selected as a one-dimensional target. The specific implementation plan is as follows:
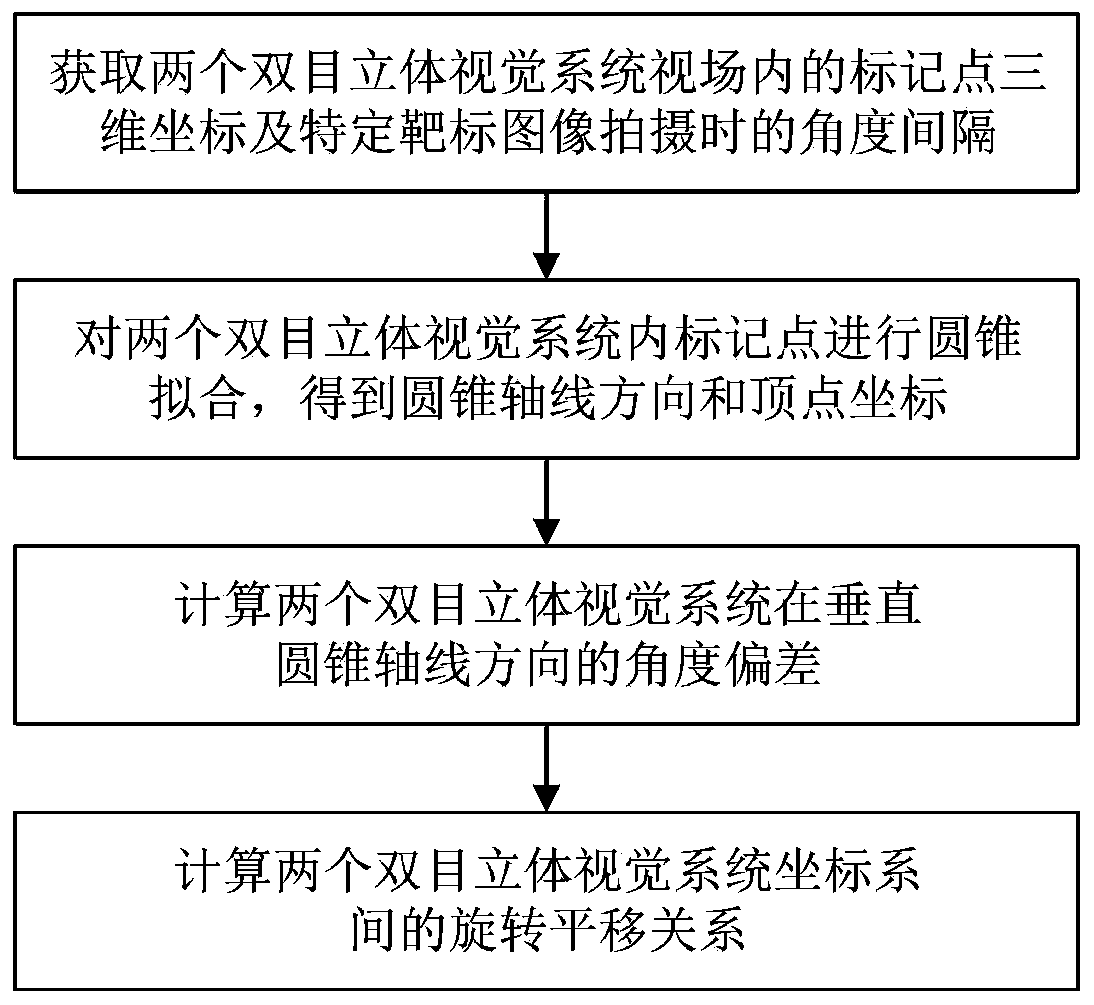
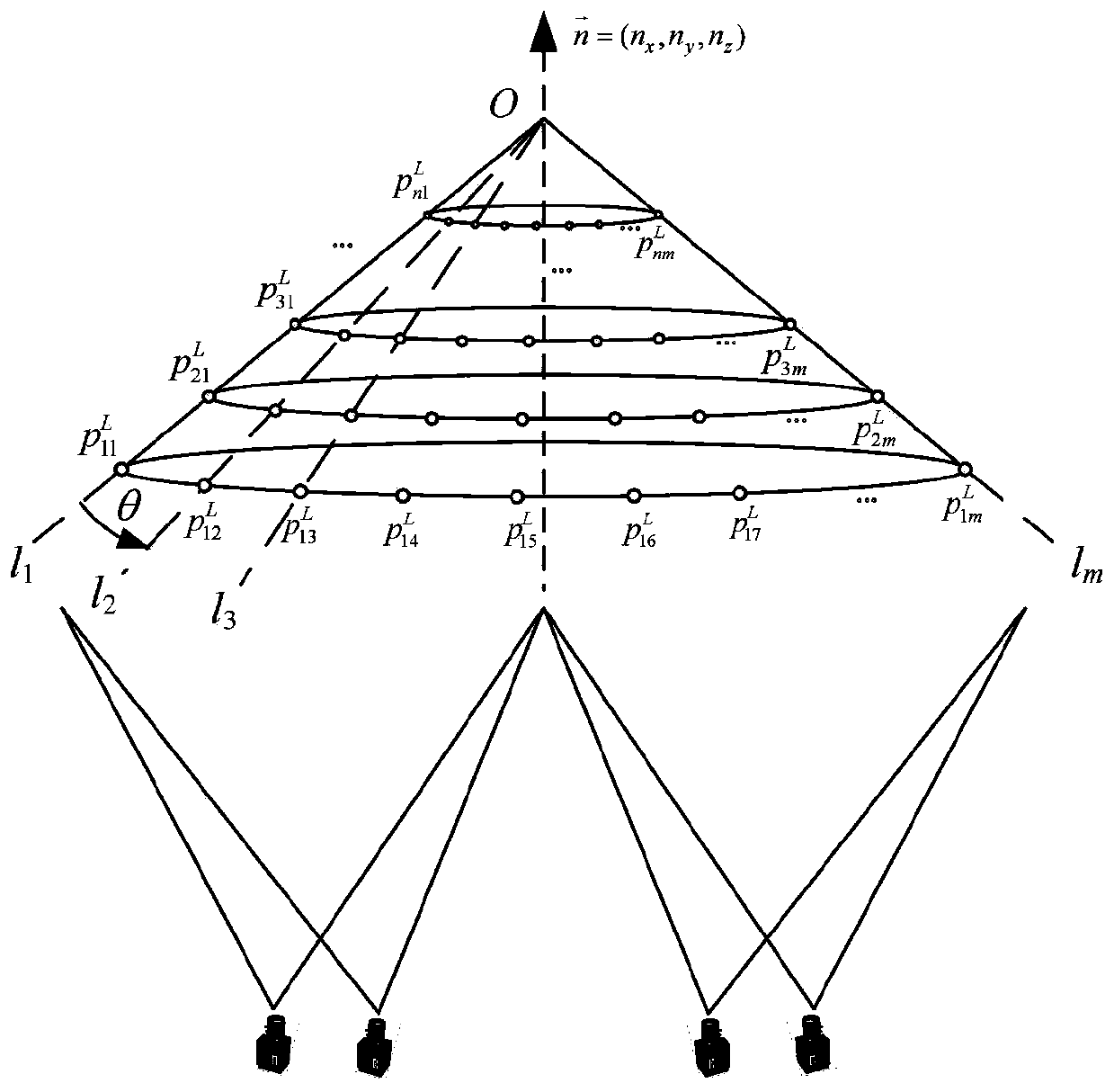
[0031] (1) Acquire the three-dimensional coordinates of the marked points on the one-dimensional target in the field of view of the two binocular stereo vision systems respectively, and use the angle sensor to obtain the angular interval when the specific target image is taken, specifically including the following steps:
[0032] (1.1) Install the angle sensor, determine the measurement field of view, and arrange a binocular stereo visio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com