Robot joint motion control method, device and terminal equipment
A technology for robot joints and joint motions, applied in the field of intelligent robots, can solve the problems of rigid movements, overshooting, affecting user experience, etc., to achieve the effect of low control cost, avoiding overshooting, and improving experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In the following description, specific details such as specific system structures, techniques such as specific system structures, and techniques are proposed to illustrate the embodiments of the present invention. However, those skilled in the art will appreciate that the present invention can also be implemented in other embodiments without these specific details. In other cases, detailed description of well known systems, devices, circuits, and methods is omitted to prevent unnecessary details to prevent the description of the present invention.
[0028] In order to illustrate the technical solution of the present invention, the description will be described below by way of example.
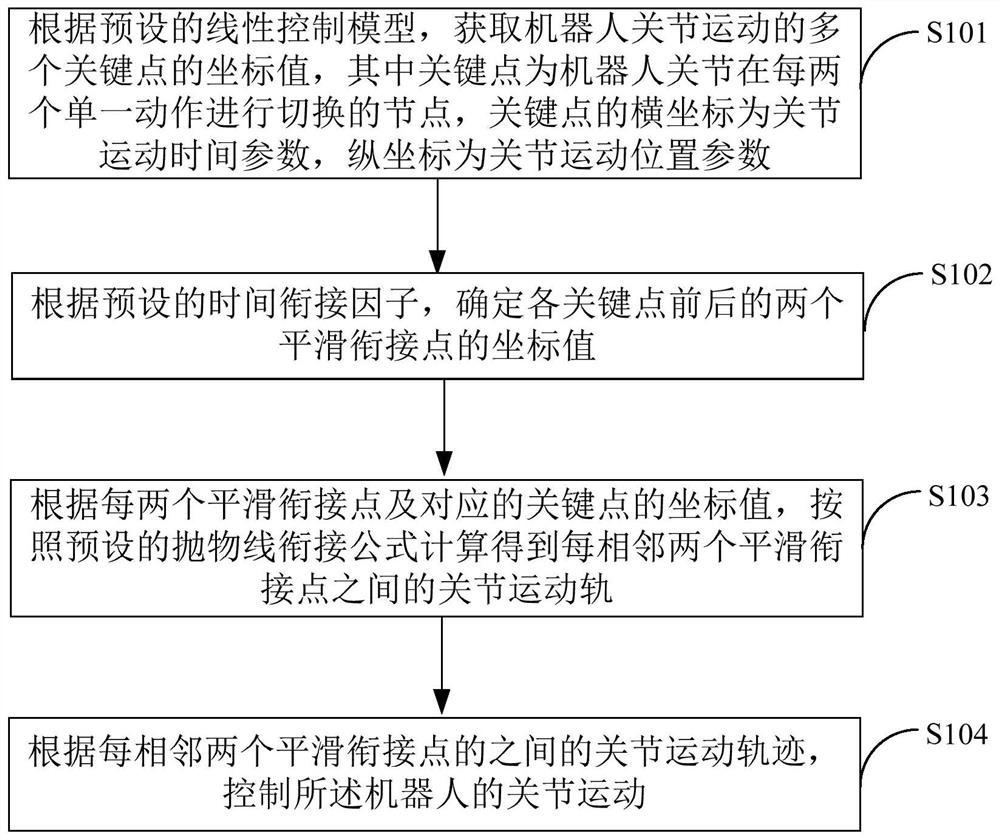
[0029] refer to figure 1 , figure 1 A flow schematic of a robot joint motion control method provided by an embodiment of the present invention. The method can be applied to the robot, which is detailed below:
[0030] S101: Depending on the preset linear control model, obtain the coordinate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com