Three-dimensional restoration method and system, terminal equipment and storage medium
A terminal device and three-dimensional technology, applied in the field of image processing, can solve problems such as inability to extract image features, high cost of three-dimensional restoration, inability to effectively and accurately generate three-dimensional models of objects, etc., and achieve the effect of increasing the number of image features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
[0063] A three-dimensional reduction system such as figure 1 As shown, including: projection equipment, at least four image acquisition equipment, terminal equipment and main frame;
[0064] At least four image acquisition devices are arranged on the main frame, and the viewing angle areas of adjacent image acquisition devices among the at least four image acquisition devices overlap two by two; the projection device is arranged on the main frame or near the inner side of the main frame;
[0065] Specifically, the image acquisition device is a camera, and the camera includes but is not limited to a depth camera, a TOF camera, and a wide-angle camera. At least four image acquisition devices are arranged on the main frame, and the viewing angle areas of adjacent image acquisition devices among the at least four image acquisition devices overlap two by two, so that the images captured by at least four image acquisition devices at the same time have scene overlap The site, exempl...
no. 2 example
[0081] A three-dimensional reduction method, such as image 3 As shown, the following three-dimensional restoration steps are performed:
[0082] S210 Acquire a first image from at least four image acquisition devices; the first image includes an object to be scanned;
[0083] Specifically, before the projecting device projects the preset pattern to the target to be scanned, the first image including the target to be scanned is acquired from at least four image acquisition devices.
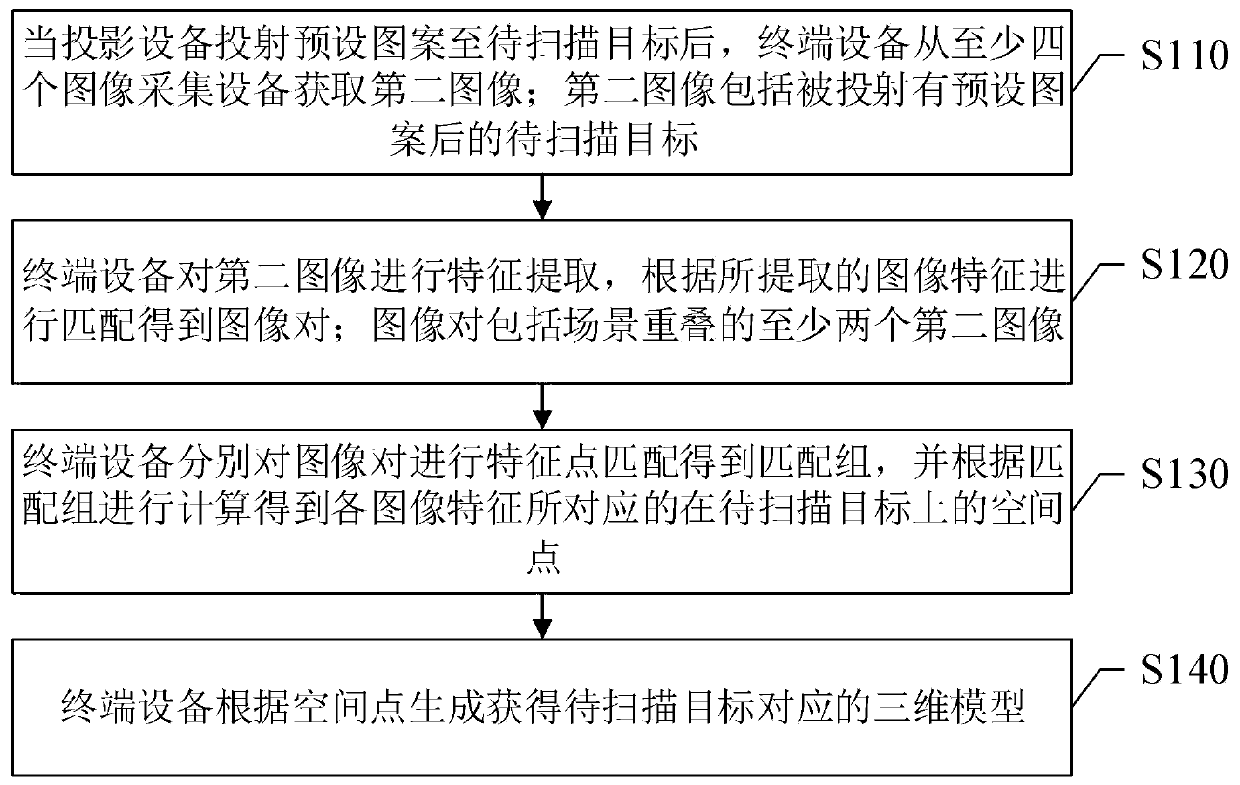
[0084] S220: After the projection device projects the preset pattern to the target to be scanned, acquire second images from at least four image acquisition devices; among the at least four image acquisition devices, the viewing angle areas of adjacent image acquisition devices overlap in pairs; the second image includes The target to be scanned after projecting a preset pattern;
[0085] S230 performing feature extraction on each second image by using a first feature extraction algorithm and a ...
no. 3 example
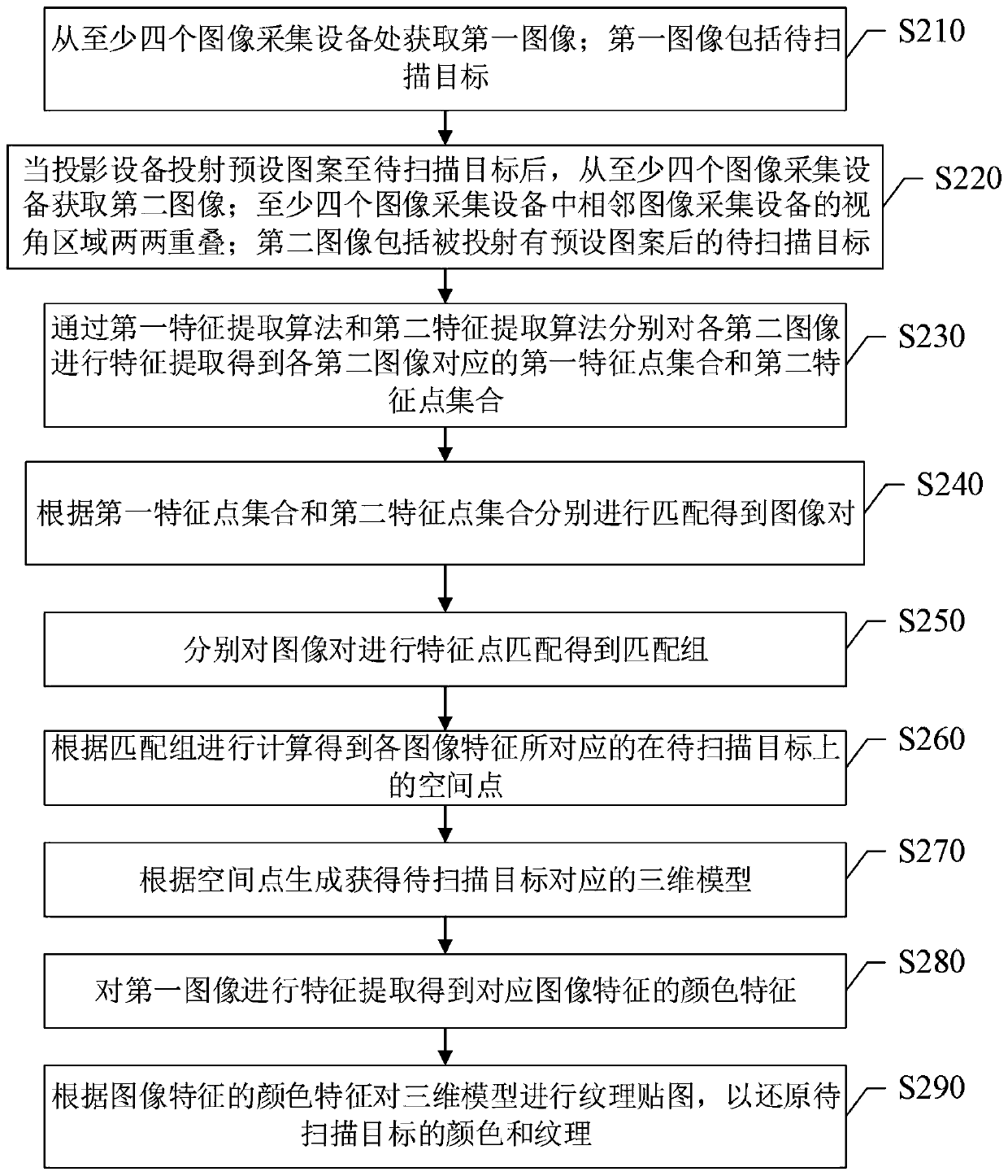
[0103] A three-dimensional reduction method, such as Figure 4 As shown, the following three-dimensional restoration steps are performed:
[0104] S310 Acquire a first image from at least four image acquisition devices; the first image includes an object to be scanned;
[0105] S320: After the projection device projects the preset pattern to the target to be scanned, acquire second images from at least four image acquisition devices; two of the viewing angle areas of adjacent image acquisition devices among the at least four image acquisition devices overlap; the second image includes The target to be scanned after projecting a preset pattern;
[0106] S330 Perform feature extraction on each second image by using the first feature extraction algorithm and the second feature extraction algorithm respectively to obtain a first feature point set and a second feature point set corresponding to each second image;
[0107] S340 Perform matching according to the first feature point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com