Obstacle avoidance method for unmanned ship with long towed line array
An unmanned ship and line array technology, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc. Avoid problems such as knots and losses, and achieve the effects of avoiding the breakage of the cable array, optimizing the overall obstacle avoidance, and reducing the speed drop
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
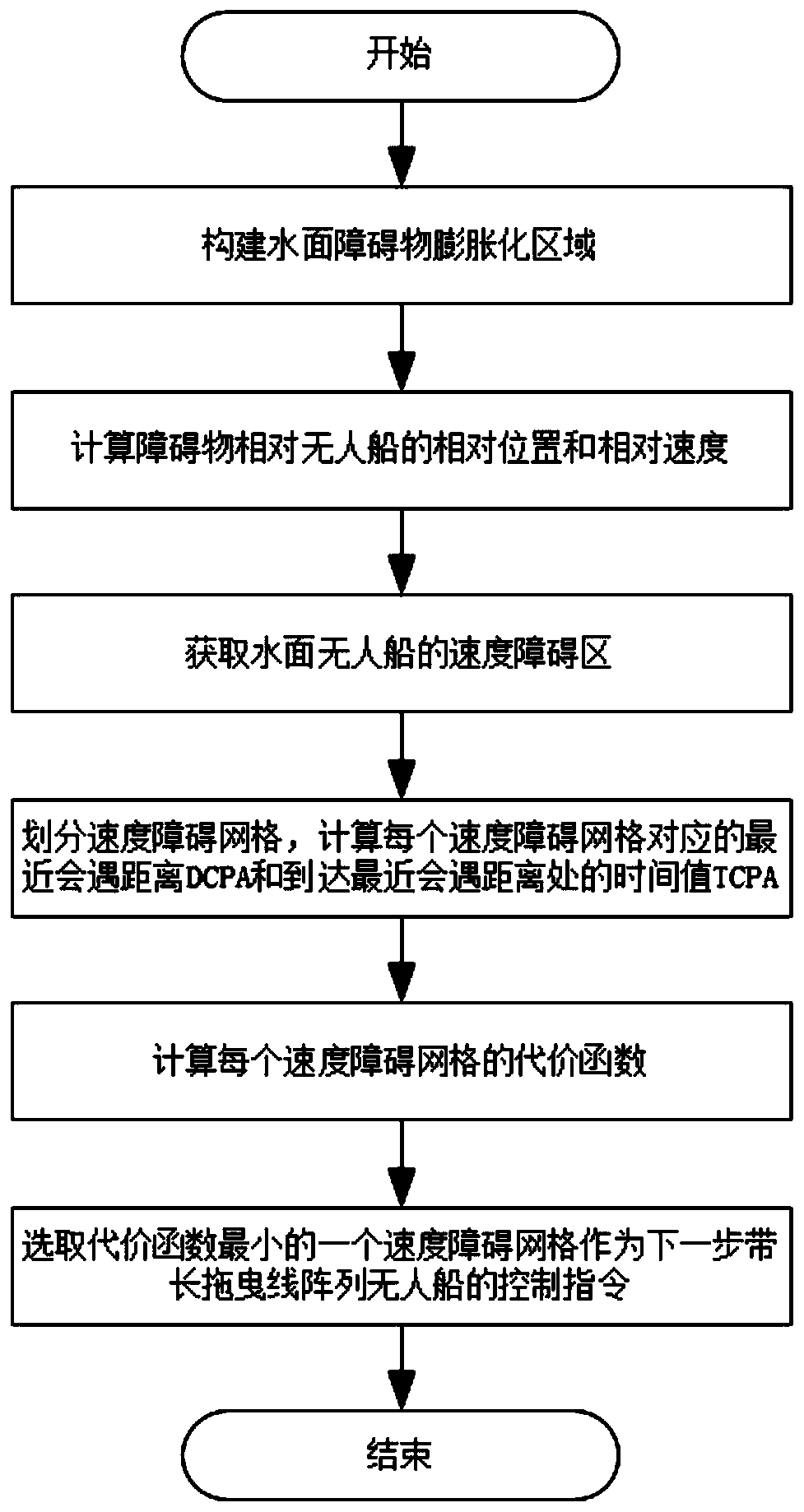
[0045] like figure 1 As shown, a method for avoiding obstacles of an unmanned ship with a long towed line array of the present embodiment includes the following steps:
[0046] S1. An unmanned ship with a long towed line array performs tasks, uses the equipped environmental perception equipment to detect water surface obstacles, continuously tracks water surface obstacles, outputs the position and center coordinates of water surface obstacles in real time, and constructs water surface obstacles Expansion area: In this embodiment, the expansion area of the water surface obstacle refers to a circular area with the center of the obstacle as the center and the artificially set safety distance as the radius. In this embodiment, the length of the long towed line array is 60m-700m.
[0047] S2. Calculate the relative position p and relative velocity v of the obstacle relative to the unmanned ship;
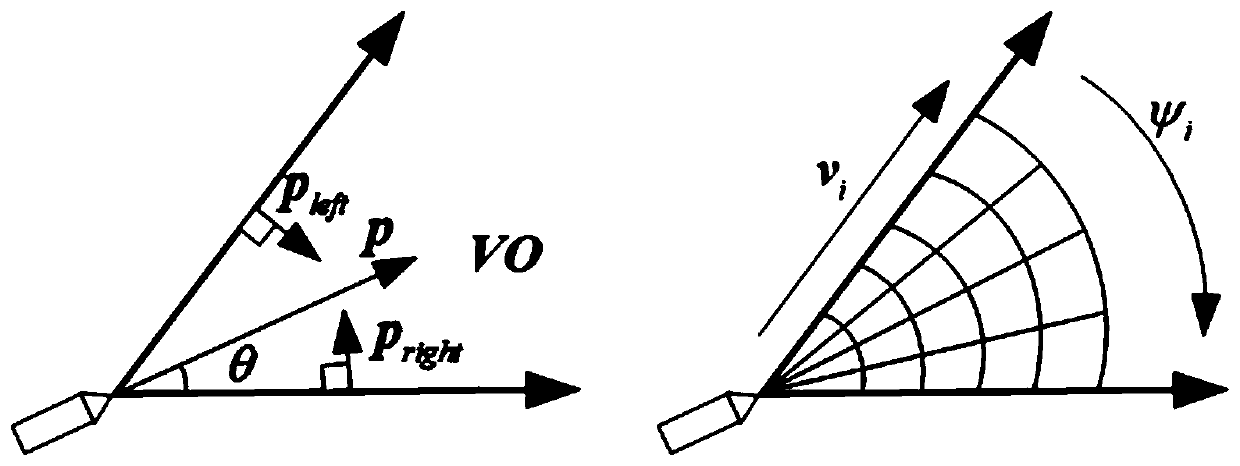
[0048] S3, obtaining the speed obstacle area of the unmanned ship; figure 2 A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com