Underwater three-dimensional scanner and control method thereof
A scanner and three-dimensional technology, applied in the direction of instruments, measuring devices, optical devices, etc., can solve the problems of unclear centerline structured light in the image, failure to consider the contrast of underwater imaging, and inability to meet high-precision modeling, etc., to achieve expansion Scope of application, the effect of improving the accuracy of 3D scanning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
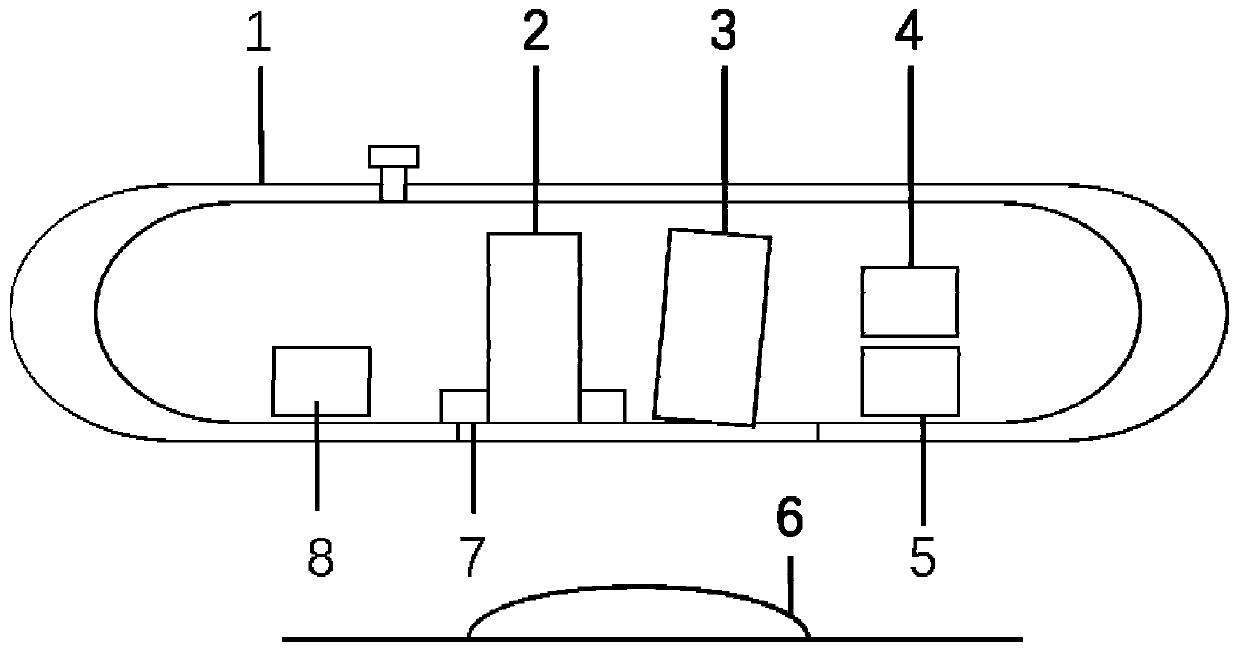
[0028] Such as figure 1 As shown, this embodiment provides an underwater three-dimensional scanner, including a host computer, a sealed cabin 1, and a line laser 2 installed inside the sealed cabin 1, an illumination module 7, an imaging module 3, an attitude sensor 8, and a communication module 4; The line laser 2 is used to emit the line structured light required for measurement; the imaging module 3 is used to collect the color image of the target object 6 and the structured light image; the attitude sensor 8 is used to measure the motion speed and attitude of the scanner at the current moment to assist the three-dimensional Reconstruction calculation; the communication module 4 is connected with the line laser 2, the lighting module 7, the imaging module 3, and the attitude sensor 8, so as to transmit image data, attitude data and control signals with the host computer.
[0029] In this embodiment, the lighting module 7 includes a combined array of LEDs, and the LED array ...
Embodiment 2
[0037] This embodiment provides a control method for an underwater three-dimensional scanner, which is based on the underwater three-dimensional scanner provided in Embodiment 1, and includes the following steps:
[0038](1) Use a photoelectric composite cable to connect the underwater 3D scanner to the host computer, and install the underwater 3D scanner on the towing body or underwater vehicle;
[0039] (2) Use the host computer to calibrate the attitude sensor 8 and the imaging module 3, and transport the underwater vehicle to the target area after the calibration is successful;
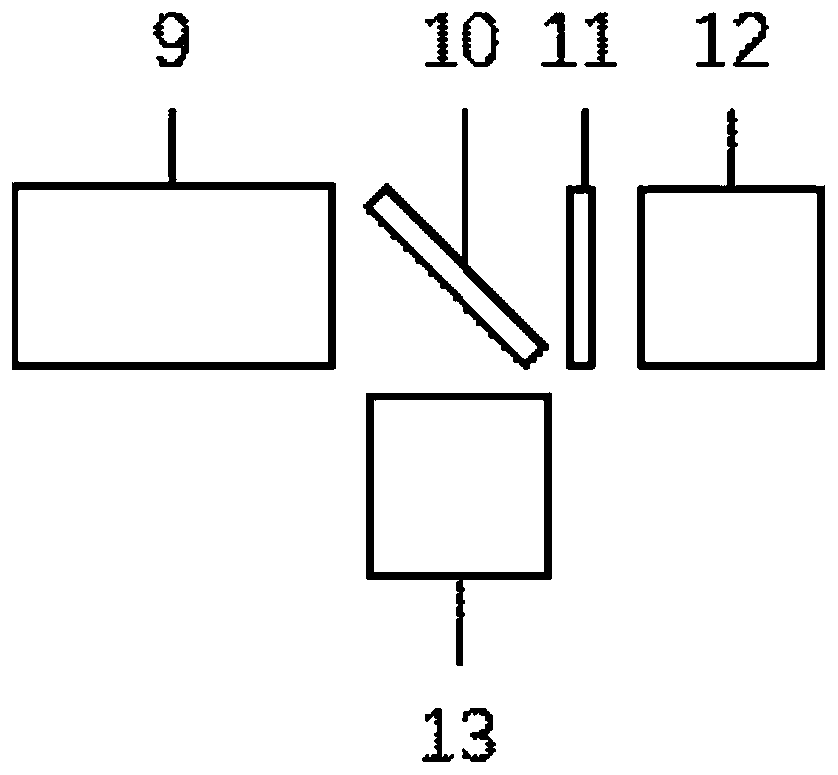
[0040] (3) The host computer controls the optical focus lens 9 through the communication module 4 to obtain a clear image of the target object 6;
[0041] (4) When the underwater three-dimensional scanner moves above the target object 6, the host computer collects the signals of the monochrome camera 12, the color camera 13, and the attitude sensor 8, and obtains the three-dimensional reconstructi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com