Port-environment-oriented man-machine hybrid automatic driving test method and test platform thereof
A technology for autonomous driving and testing methods, applied in the testing of machine/structural components, vehicle testing, measuring devices, etc. The effect of testing efficiency, reducing testing cost and improving driving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
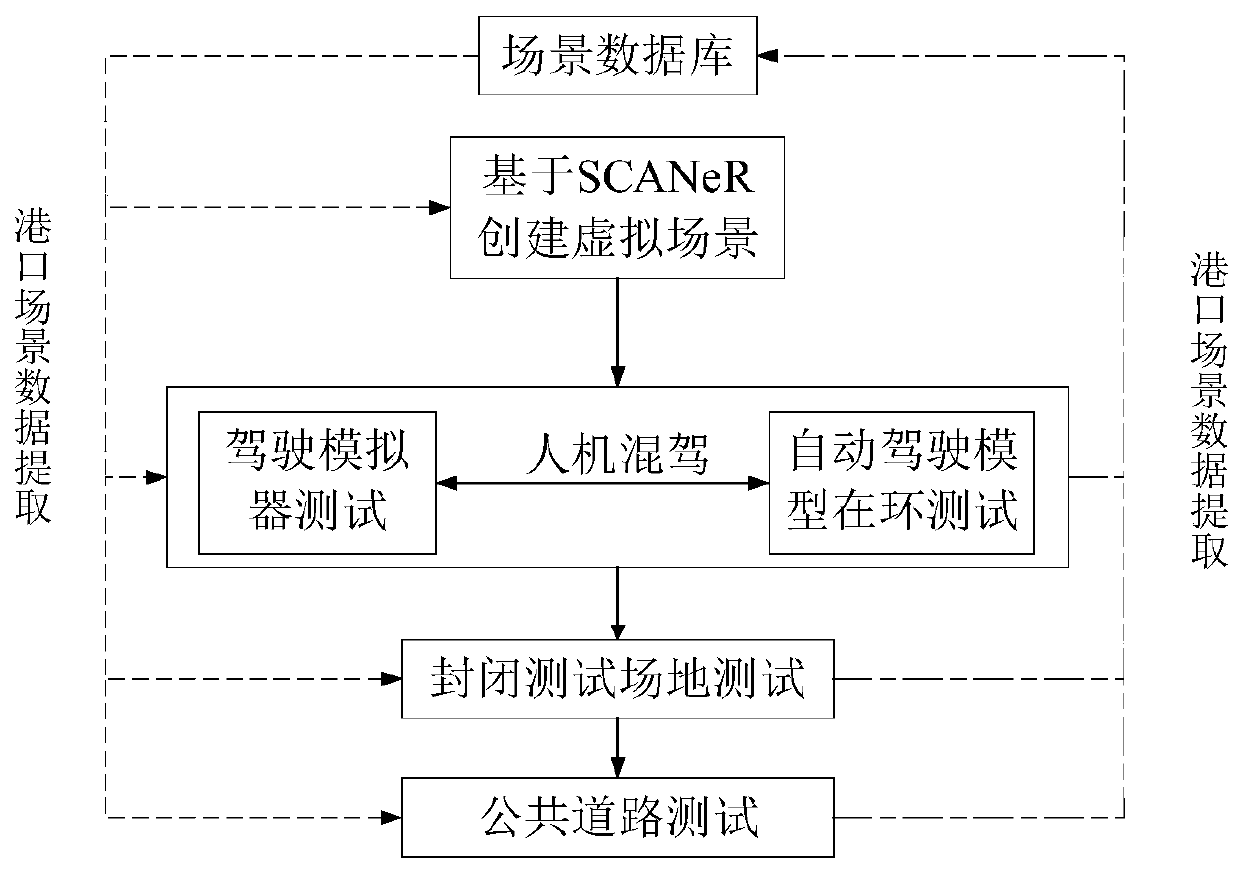
[0043] Such as figure 1 As shown, the test method of the man-machine mixed driving automatic driving facing the port environment of the present invention comprises the following steps:
[0044] A. Virtual testing:
[0045] (1) Create a virtual vehicle driving environment based on SCANeR (simulating the vehicle driving environment in a port scene) based on the information collected from real weather conditions, road environments, and traffic scenarios and test requirements, and model according to the vehicle parameters of real vehicles or test requirements Create a vehicle model that conforms to the dynamics, and combine the geometric model of the perceived target in the driving environment of the vehicle with the physical model of the sensor itself for hybrid modeling to simulate its own on-board sensing system;
[0046](2) The vehicle model runs in the virtual vehicle driving environment in the step (1), and detects whether the vehicle model can perceive the road environment...
Embodiment 2
[0058] On the basis of Embodiment 1, after each test is completed, the test data of the virtual vehicle driving environment, the closed field test and the actual field test are saved, so as to facilitate the creation of the scene database in the later stage to ensure the scene of the automatic driving vehicle test Rich types.
[0059] Furthermore, the scene database includes scene data adapted to various vehicle driving environments facing the port environment, closed field tests and actual port field tests.
[0060] Before each test, the saved test data is extracted from the created scene database for use or for later test comparative analysis.
Embodiment 3
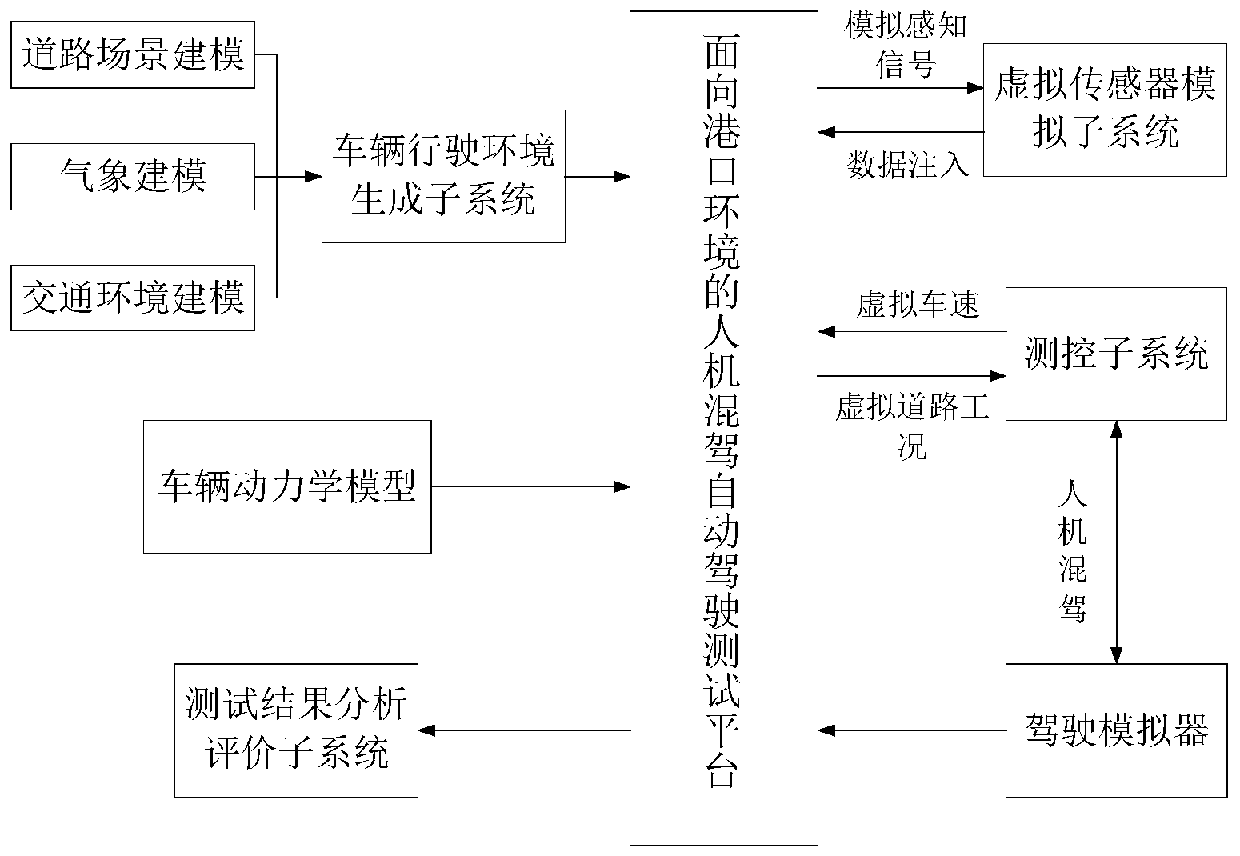
[0062] The human-machine mixed driving automatic driving virtual test platform based on the test method described in Embodiment 1 of the present invention includes a vehicle driving environment generation subsystem, a vehicle dynamics model subsystem, a virtual sensor simulation subsystem, a measurement and control subsystem, a test The result analysis and evaluation subsystem and the driving simulator, the communication connection between the vehicle driving environment generation subsystem, the vehicle dynamics model subsystem, the virtual sensor simulation subsystem, the measurement and control subsystem, the test result analysis and evaluation subsystem and the driving simulator ;
[0063] The vehicle driving environment generating subsystem is used to create a virtual vehicle driving environment according to the information collected in natural scenes or the information of test requirements; the vehicle driving environment generating subsystem includes a road scene generat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com