Path planning method for automatic parallel parking based on two second-order Bezier curves
A parallel parking and path planning technology, applied in the direction of the control device, etc., can solve the problems that the moving obstacles cannot be effectively avoided, the trajectory generation algorithm is complex, and the control points are difficult to find, etc., so as to improve the vehicle obstacle avoidance and parking. Efficiency, simple trajectory generation algorithm, and the effect of improving environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments. It should be pointed out that the technical solution and design principles of the present invention will be described in detail below only with an optimized technical solution, but the protection scope of the present invention does not limited to this.
[0065] The described embodiment is a preferred implementation of the present invention, but the present invention is not limited to the above-mentioned implementation, without departing from the essence of the present invention, any obvious improvement, replacement or modification that those skilled in the art can make Modifications all belong to the protection scope of the present invention.
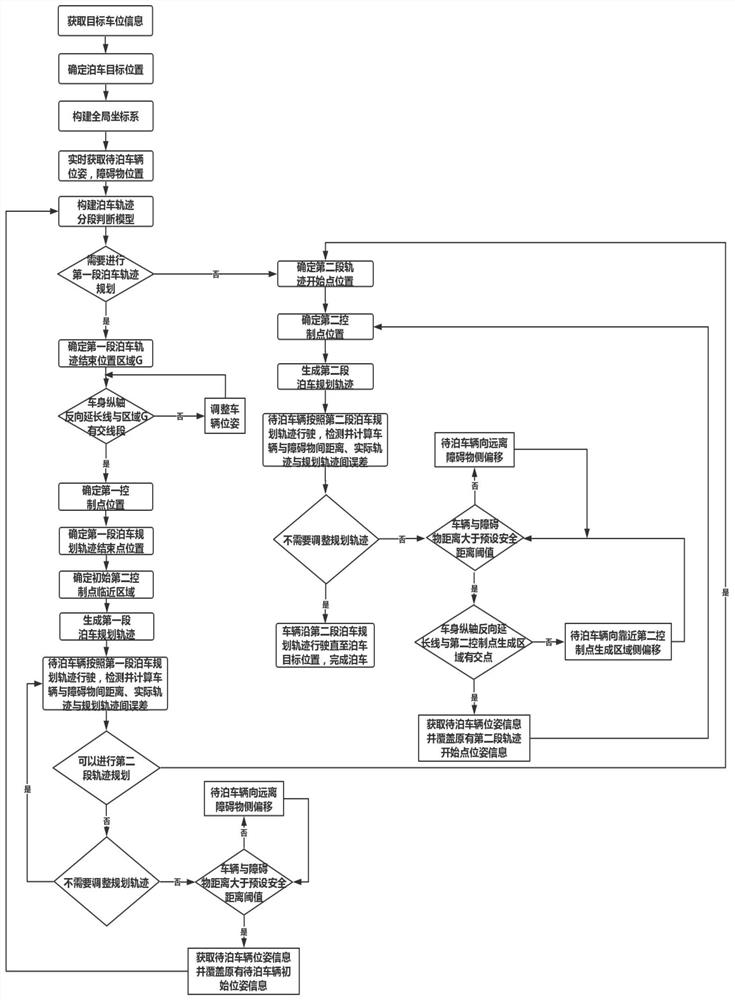
[0066] A flow chart of an automatic parallel parking path planning method based on two second-order Bezier curves is shown in figure 1 shown, including the following steps:
[0067] 1) Obtain the target ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com