Intelligent bus route planning method based on multi-objective dynamic particle swarm optimization
A technology of particle swarm optimization and intelligent public transportation, which is applied in the direction of vehicle position/route/height control, motor vehicle, non-electric variable control, etc., to achieve the effect of improving comfort, improving safety and comfort, and increasing smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The following is a detailed description of the embodiments of the present invention. This embodiment is carried out based on the technical solution of the present invention, and provides detailed implementation methods and specific operation processes to further explain the technical solution of the present invention.
[0061] The present embodiment adopts the smart car refitted from a bus with a length of 12m, a width of 2.5m, and a height of 3.3m, equipped with laser radar, millimeter wave radar, GPS positioning system and machine vision system, and carries out path planning experiments on structured roads.
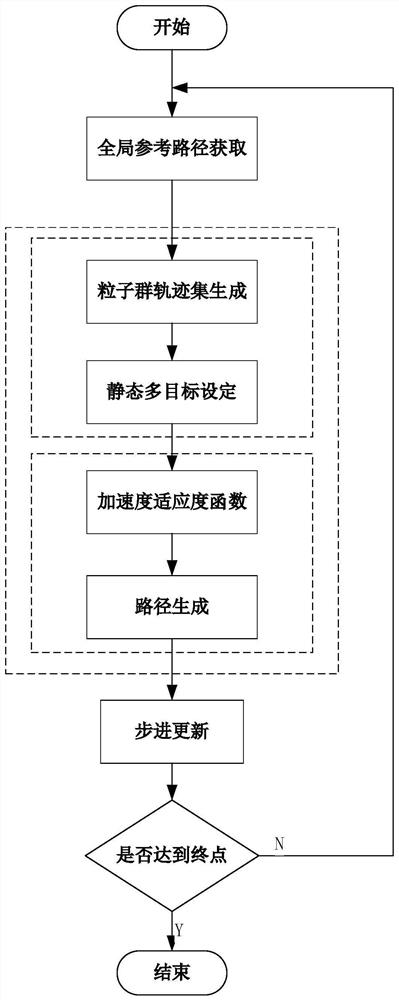
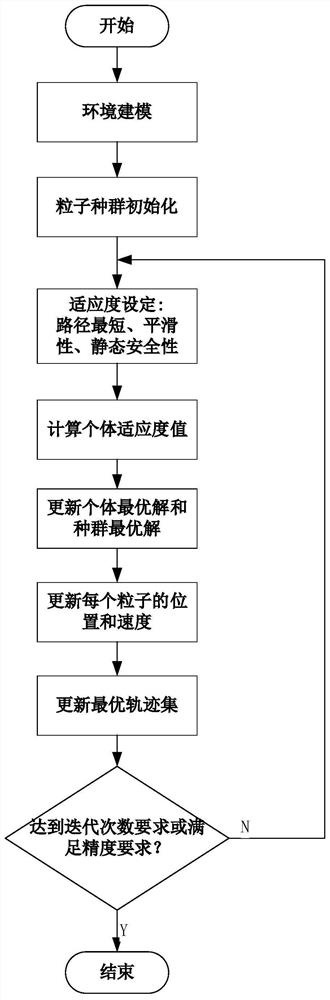
[0062] A kind of intelligent bus path planning method based on multi-objective dynamic particle swarm optimization provided by this embodiment, see figure 1 , 3 , 4, including the following process:
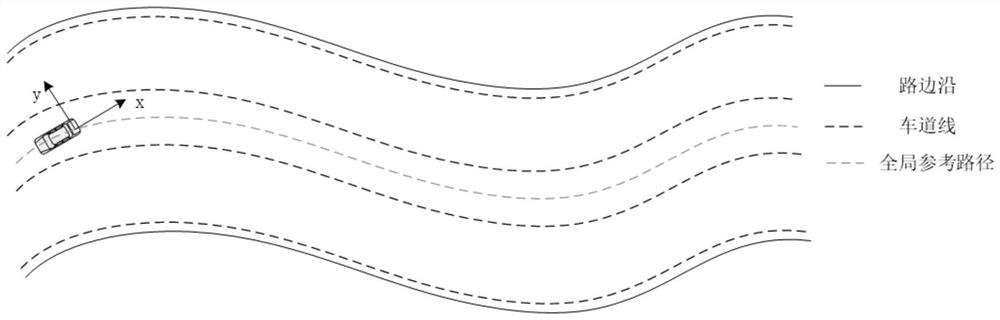
[0063] Step 1, global reference path generation;
[0064] Obtain vehicle and road information in real time according to the on-board sensors, extract road rule li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com