Road edge detection system and method based on laser radar and fan-shaped space segmentation
A laser radar and space segmentation technology, applied in the direction of instruments, character and pattern recognition, computer components, etc., can solve problems that are easy to cause artificial features, the impact of extraction results, and single clustering features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
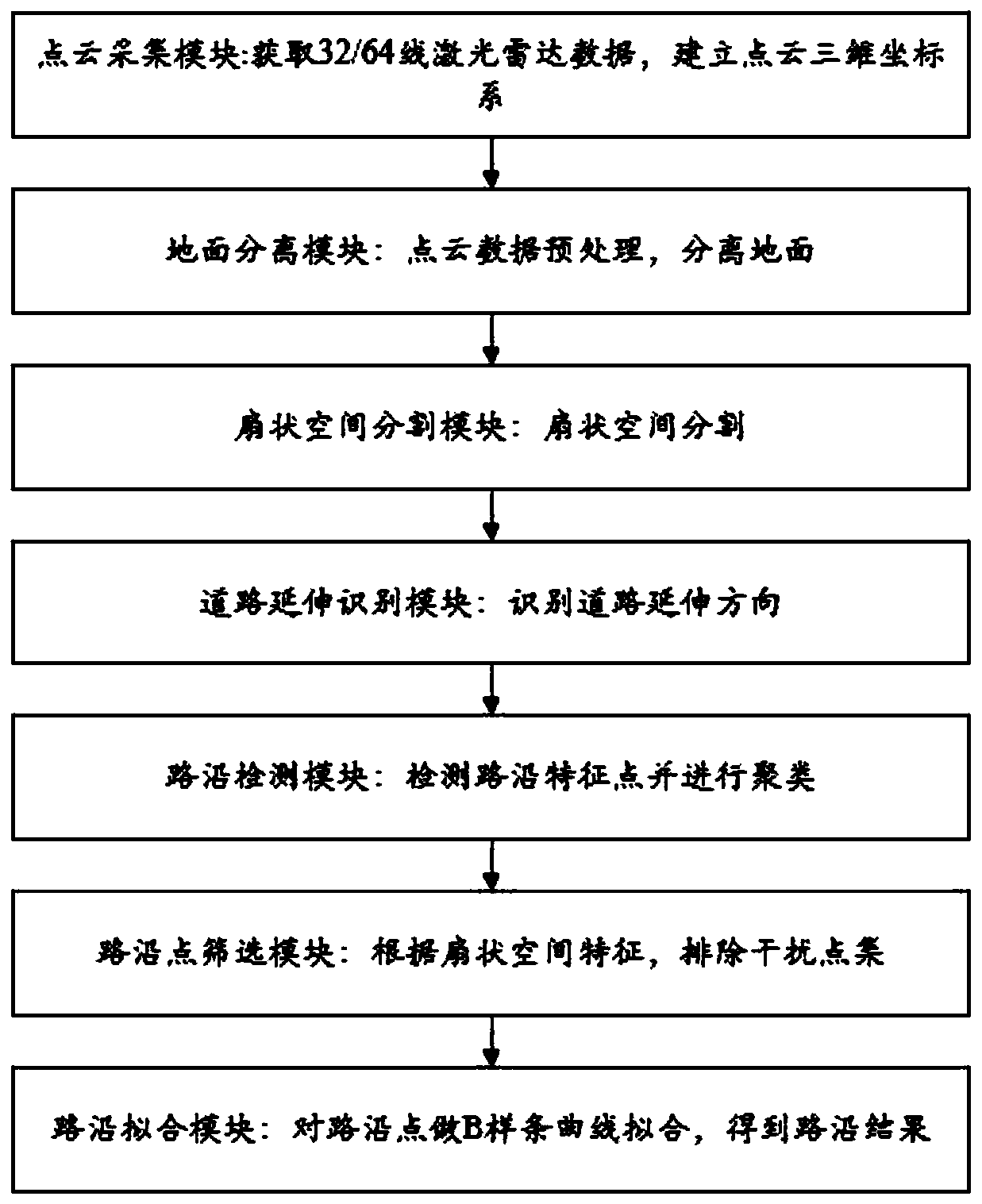
[0076] Such as figure 1 As shown, a roadside detection system based on laser radar and fan space segmentation, including:
[0077] The point cloud acquisition module is used to scan the surrounding environment of the vehicle through 32 / 64 line lidar, collect and process the point cloud data of the surrounding environment, and convert the point cloud data with spatial coordinates, reflection brightness and radar ring number to local coordinates In the system, output each frame of data to the ground separation module;
[0078] Ground separation module: used to extract the road pavement of the current point cloud set from a frame of point cloud data. The road pavement refers to the surface composed of the points closest to the ground of all objects in the point cloud space, and the ground point cloud set is output To the road edge detection module;
[0079] Fan-shaped space segmentation module: it is used to divide the space in the three-dimensional coordinates into different f...
Embodiment 2
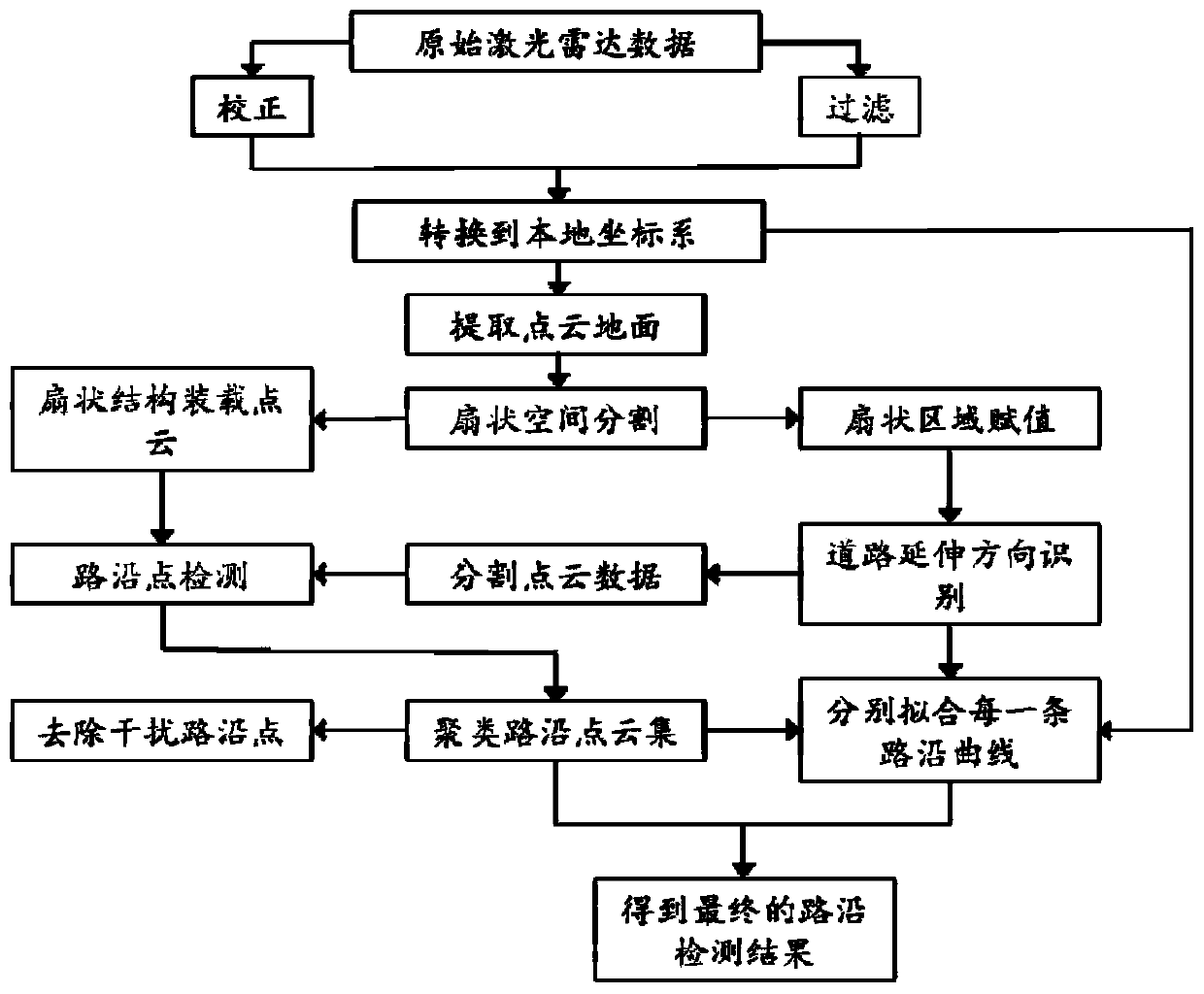
[0086] Such as Figures 2 to 7 As shown, a roadside detection method based on laser radar and fan-shaped space segmentation, using the roadside detection system described in Embodiment 1, specifically includes the following steps:
[0087] S1. Use the point cloud acquisition module to make the lidar scan the surrounding environment of the vehicle, obtain the reflection point cloud data, convert it to the local coordinate system for a certain degree of correction, and estimate the measurement accuracy range according to the number of radar lines;
[0088] S2. Using the ground separation module and using the sampling consistency segmentation algorithm to extract the ground point cloud set from the processed point cloud data;
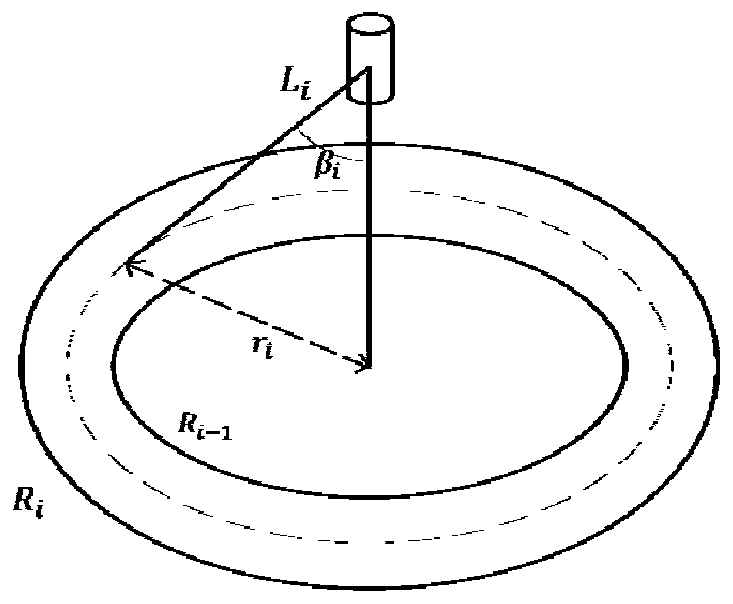
[0089] S3. Using the fan-shaped space segmentation module, according to the characteristics of the laser radar reflection point cloud, calculate the segmentation parameters, and divide the space in the three-dimensional coordinates into different fan-shape...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com