Unmanned airship avoidance system and unmanned airship flight control system
A flight control system, unmanned airship technology, applied in the field of aerostats, can solve problems such as inability to perceive the surrounding environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
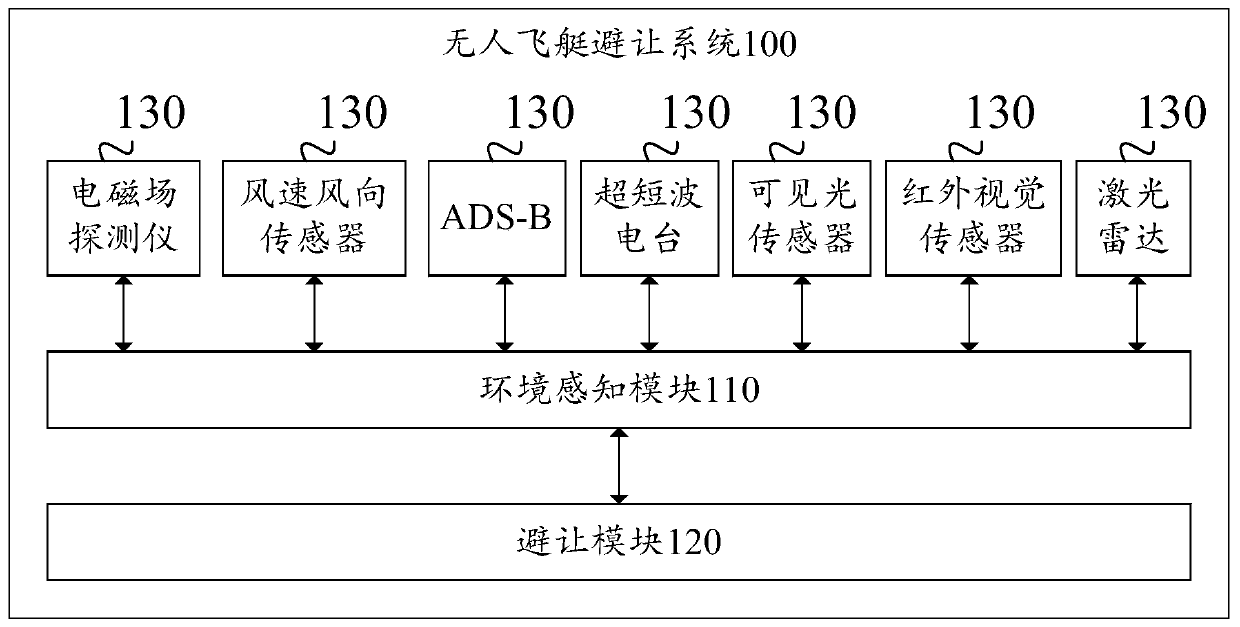
[0073] Example 1: The environmental perception module is also configured to obtain the weighted information of the sensing information detected by the electromagnetic field sensor and the ADS-B when the flying height of the unmanned airship is less than 100 meters, wherein the weight corresponding to the electromagnetic field sensor is 0.7, the weight value corresponding to ADS-B is 0.3; when the flight altitude is less than 100 meters (m), the probability of ground high-voltage line objects is relatively high, and accordingly, the weight value of the electromagnetic field sensor is relatively large.
example 2
[0074] Example 2: the environmental perception module is also configured to obtain the weighted information of the electromagnetic field perception instrument and the sensing information detected by the ADS-B when the flying height of the unmanned airship is greater than 100 meters, wherein the weight corresponding to the electromagnetic field perception instrument The value is 0.2, and the weight value corresponding to ADS-B is 0.8; contrary to the above example 1, when the flight altitude is greater than 100 meters (m), the probability of ground high-voltage line objects is small, and correspondingly, the weight value of the electromagnetic field sensing instrument is relatively high. small.
example 3
[0075] Example 3: The environment perception module is further configured to use the weighted information corresponding to the shape information of the obstacle acquired by the visible light sensor and the distance information of the obstacle acquired by the laser radar when the ambient light intensity is within the detection range of the visible light sensor Perform fusion processing to obtain the spatial position information of the obstacle, where the weighted values of the visible light sensor and the laser radar are 0.5 respectively;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com