Automobile curve blind zone following control method based on Internet of automobiles
A technology of following control and Internet of Vehicles, which is applied in the field of automobile driving safety, can solve the problems of insufficient vehicle-vehicle information interaction, loss of following targets, and limited vision of the driver, so as to avoid risks, improve safety, and achieve fast and no loss. toggle effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with accompanying drawing.
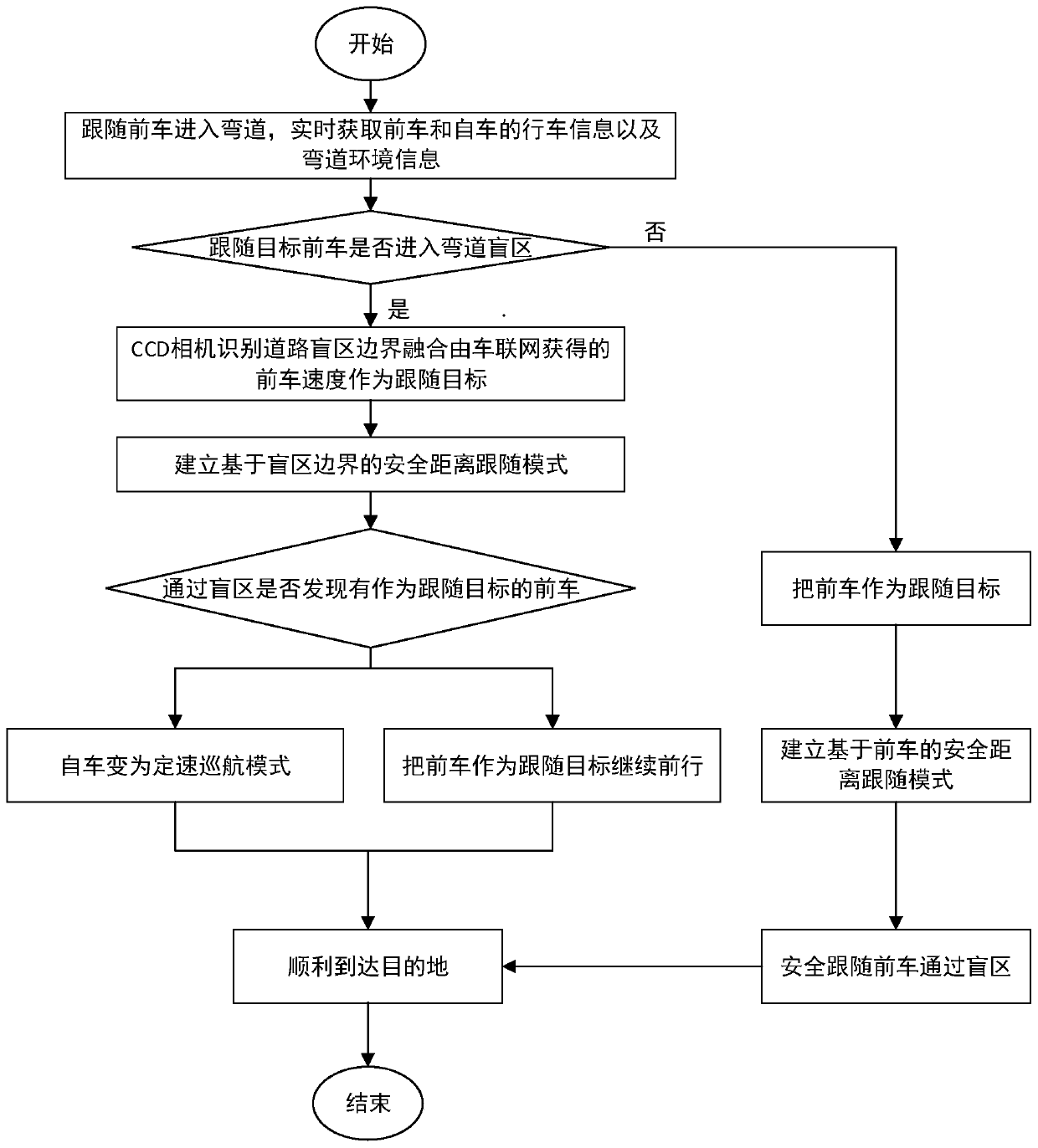
[0029] The present invention provides a method for following a blind spot in a curve based on the Internet of Vehicles, such as figure 1 shown, including the following steps:
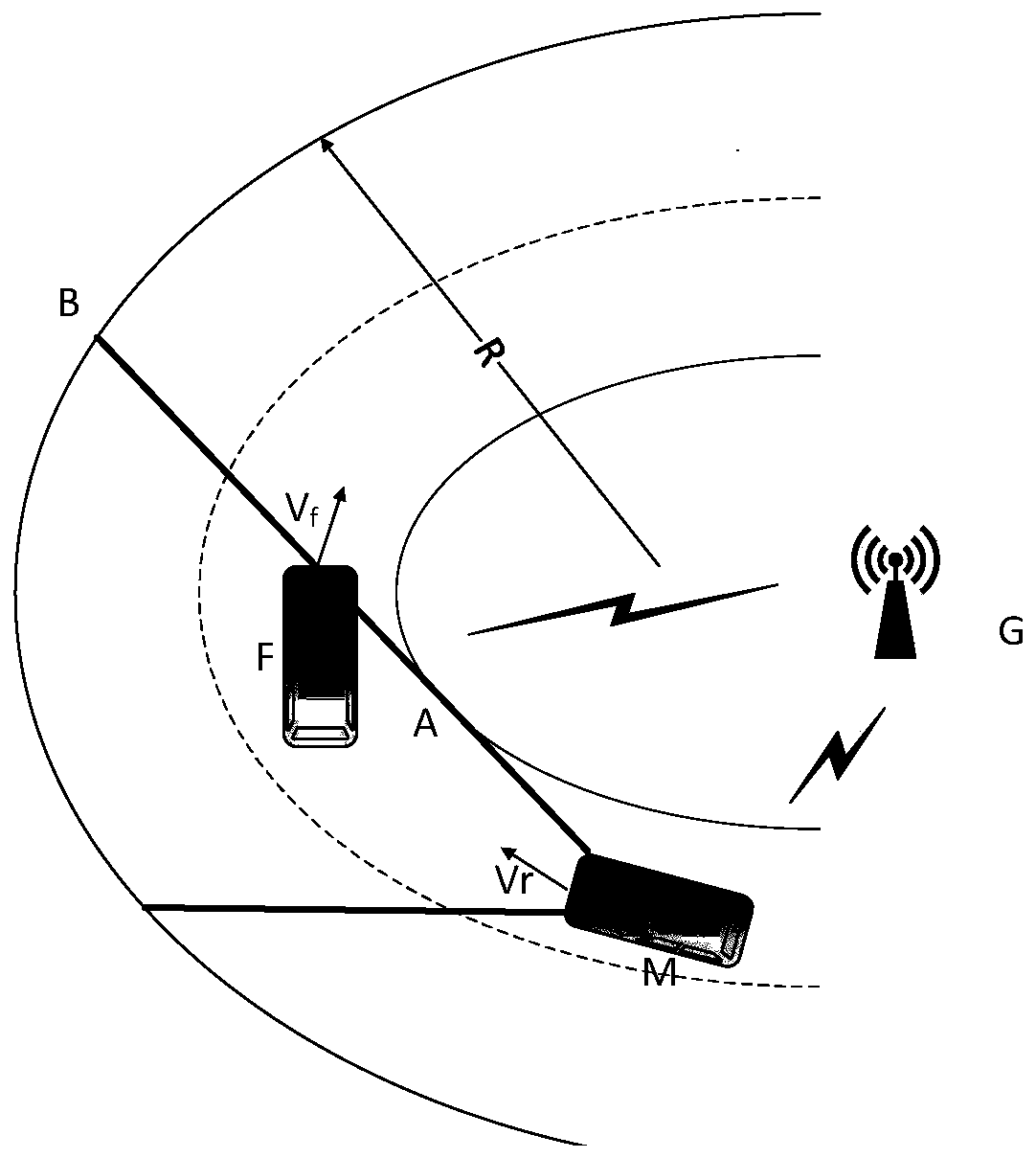
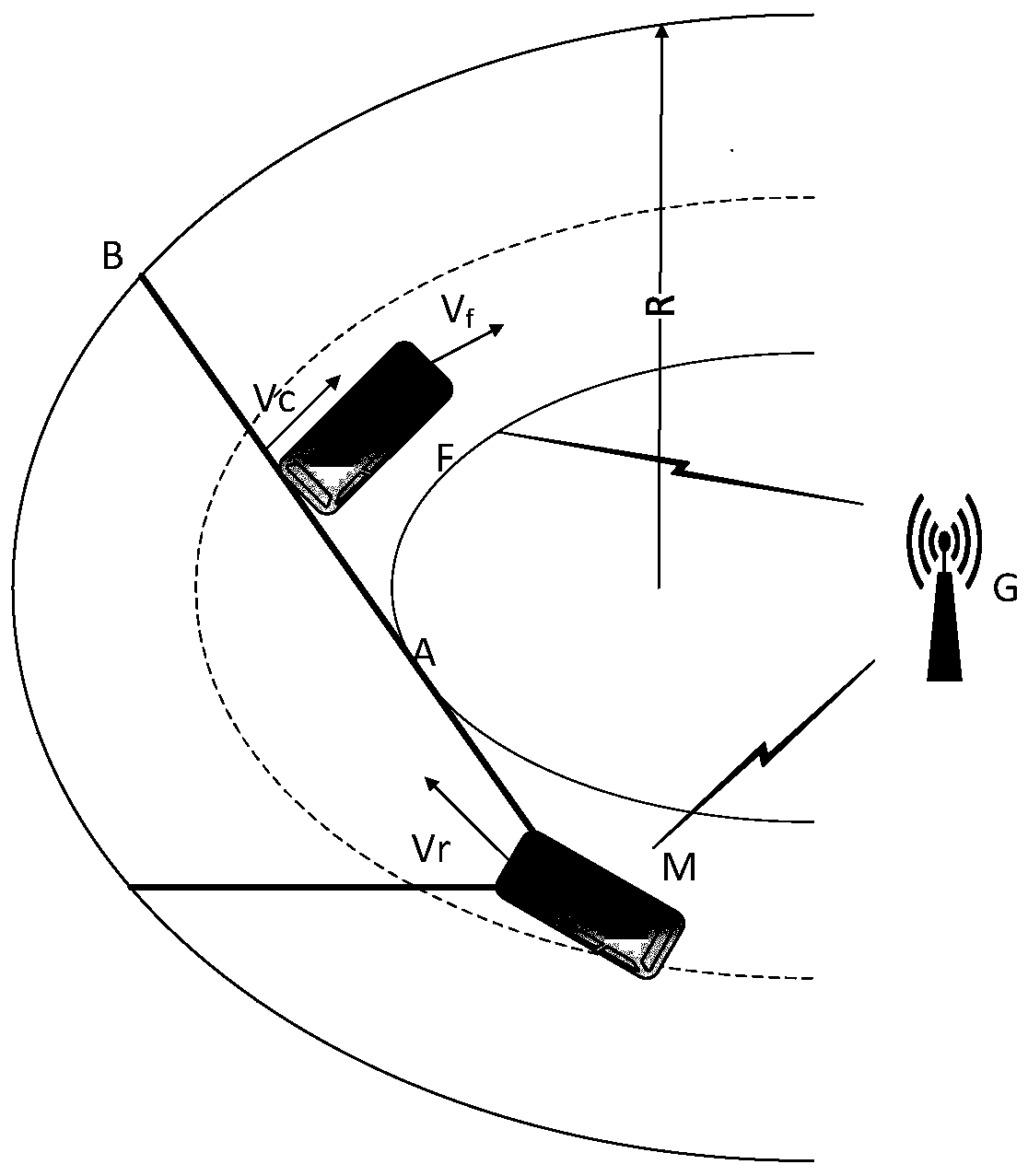
[0030] Step 1: Follow the vehicle in front to enter the curve, and obtain the information of the vehicle in front, the vehicle and the environment of the curve.
[0031] CCD can be installed on the front bumper of the vehicle, and the industrial camera can be used to transmit the position information of the vehicle ahead and the curve environment information to the electronic control unit ECU; there are 3 vehicle radars, one of which is set in the middle of the front bumper of the vehicle , and the other two are respectively placed at both ends of the front bumper, which are used to detect the relative distance information between the own car and the front car and transmit it to the electronic contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com