Calibration device and radar and camera combined calibration method and system
A calibration device and joint calibration technology, applied in the field of calibration, can solve the problems of ignoring angle deviation, etc., and achieve the effects of simple device, accurate calibration effect and simple method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
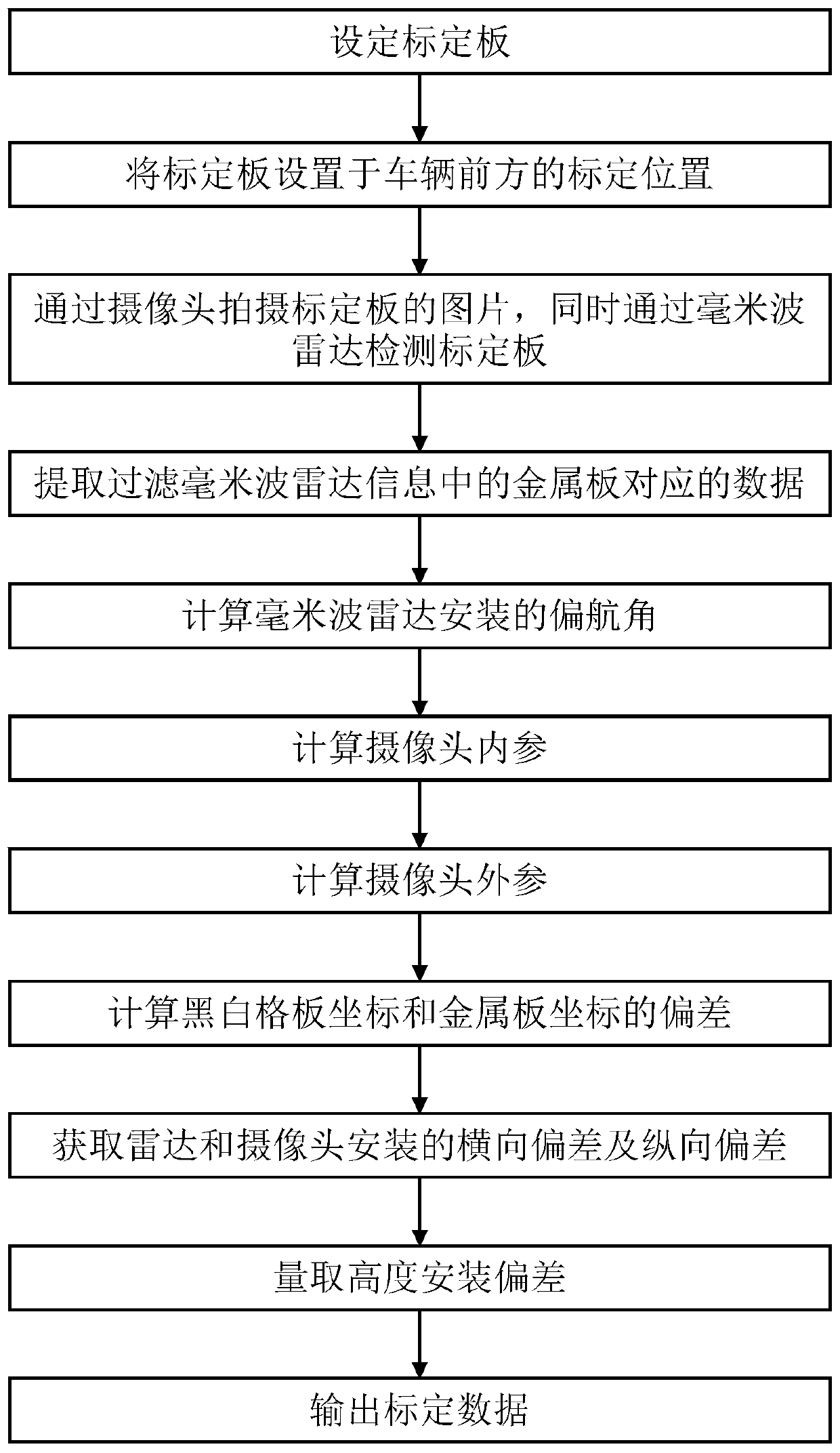
[0042] refer to figure 1 As shown, the present invention provides a radar and camera joint calibration method, comprising the following steps:
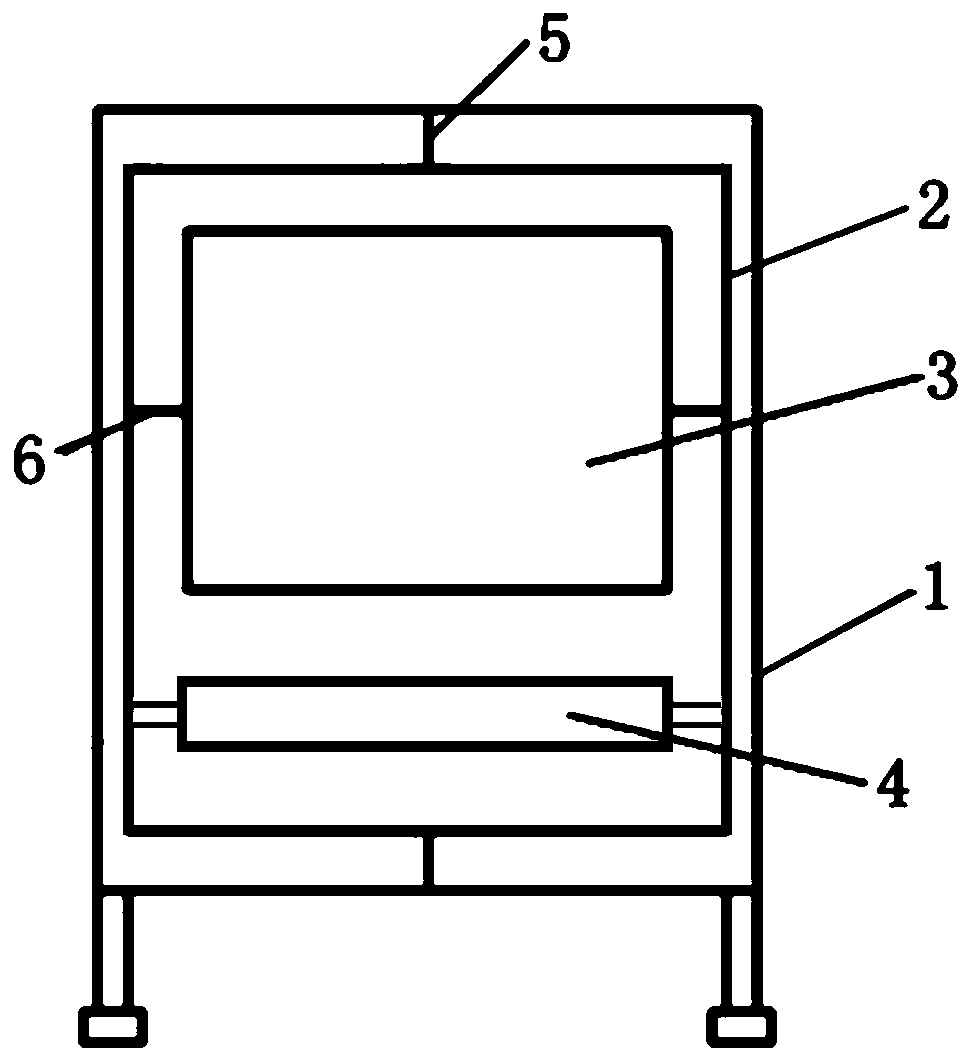
[0043] Step 1: Set up the calibration device.
[0044] The calibration device includes a bracket 1, an inner frame 2 mounted on the bracket 1 and capable of rotating around the vertical direction, a metal plate 4 fixedly mounted on the inner frame 2, and a metal plate 4 that rotates in a direction perpendicular to the direction of rotation of the inner frame 2. black and white grid board 3.
[0045] Since millimeter-wave radar has different reflectivity to metal and non-metal, in order to better extract the data of the metal plate 4 area from the collected radar data, therefore, in this embodiment, the metal plate 4 and the metal plate 4 are The other parts of the calibration device are made of different materials, that is, the metal plate 4 is made of metal, and other parts of the calibration device except the metal plate 4 are mad...
Embodiment 2
[0101] The present invention also provides a radar and camera joint calibration system, including the calibration device, camera, radar, and processing terminal as described in Embodiment 1, the processing terminal includes a memory, a processor and a bus, and the memory stores at least A program, the system implements the radar and camera joint calibration method as described in Embodiment 1 of the present invention.
[0102] The processor includes one or more processing cores, the processor is connected to the memory through the bus, the memory is used to store program instructions, and the processor implements the joint calibration of the radar and the camera described in Embodiment 1 of the present invention when executing the program instructions in the memory method.
[0103] Further, as an executable solution, the so-called processor can be a central processing unit (Central Processing Unit, CPU), and can also be other general-purpose processors, digital signal processo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com