


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Unmanned aerial vehicle dunking and rebounding self-evolution intelligent system and control method
A technology of intelligent system and control method, applied in the direction of unmanned aerial vehicle, rotorcraft, motor vehicle, etc., can solve the problem of no self-evolution related method. Apply drone to learn to shoot basketball independently, basketball research has not yet appeared, reduce recoil And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0138] Taking the self-evolution control method of self-evolution control method in a specific environment as an example, a self-evolution intelligent system for UAV slam dunk based on three cameras will be described in detail.
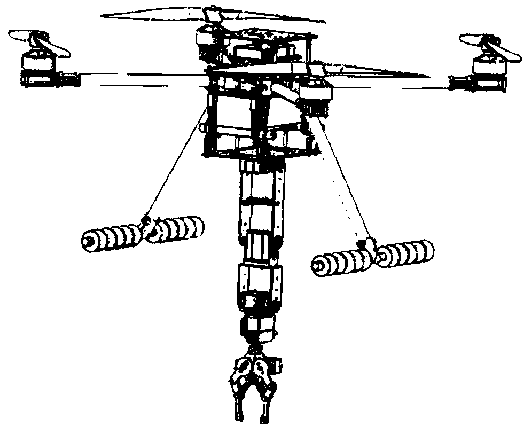
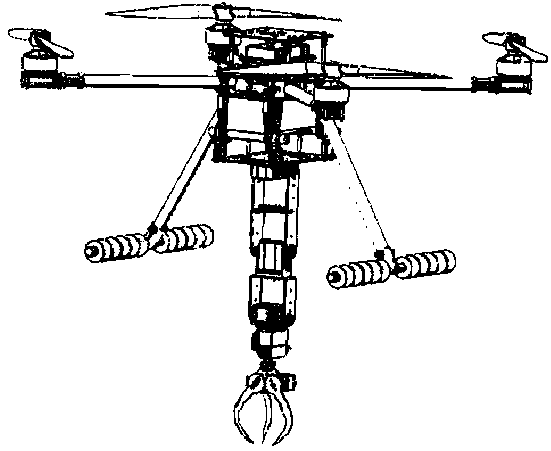
[0139] Step 1, that is, before the drone takes off, measure the quality of the delivered goods, and install devices such as a camera, a drone flight controller module, and an onboard central processing unit (which contains a sensor module) on the drone. Based on the self-evolutionary control method, a control system is established.
[0140] The specific steps of the self-evolution control method are as follows:
[0141] 1) Selection and measurement of key variables: Select key variables that affect the mechanism model in the environment, including three parts: drone control variables, cargo control variables, and environment control variables. The control variable of the drone includes the initial speed v of the flight of the drone, the flight height...
Embodiment 2
[0149] In the following, the control method of the dual-unsteady system will be described in detail by taking the delivery of goods by UAV in the air as an example.
[0150] Step 1. Before the UAV takes off, measure the quality of the delivered goods. Install the camera, UAV flight controller module and on-board CPU (which contains the sensor module) and other devices on the UAV to measure the quality of the UAV. , and is set by the final control rule set for UAV self-evolution.
[0151] Step 2, take off the UAV, and the UAV will fly to the expected destination according to the control method of self-evolution.
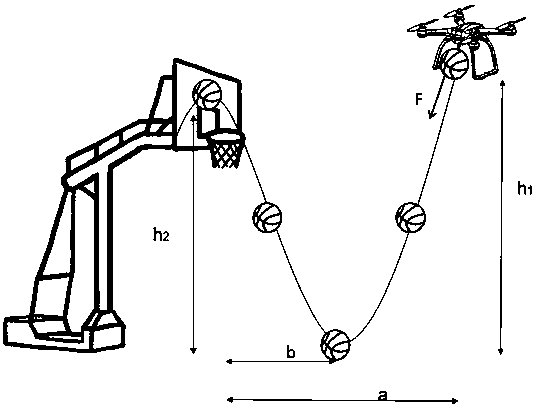
[0152] Step 3: The UAV arrives at the position of the projected object. According to the control method of the dual-unsteady system, the goods are projected in the air, and the size of the estimated compensation is quickly calculated, so that the actual attitude value of each channel can track the expected value to ensure that the projectile of the aircraft Smooth tr...
Embodiment 3
[0154] Embodiment 3: The following is an example of the precise delivery of goods by UAVs in a cave in the wild, specifically illustrating the joint control of the self-evolving intelligent system and the dual unstable system, as shown in Figure 19 shown.
[0155]Considering the harsh environment of wild caves, it is impossible to establish a spherical panoramic camera on the ground. The onboard drone camera needs to be a binocular camera, GPS, and a transmitter that can launch markers is installed on the drone.
[0156] Step 1: The UAV receives the specific rescue location, and carries the rescue supplies to the cave where the person is trapped.
[0157] Step 2: The UAV emits markers on the side wall of the cave, recognizes and detects them through the onboard binocular camera, learns from the physical model of the quadrotor drone dunking in an ideal environment, and passes the final marker drop point and time, and The possible trajectory of the launched parabola is calcula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com