


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Point cloud data processing method and device based on rotation and terminal equipment
A technology of point cloud data and processing methods, applied in three-dimensional object recognition, instrument, character and pattern recognition, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
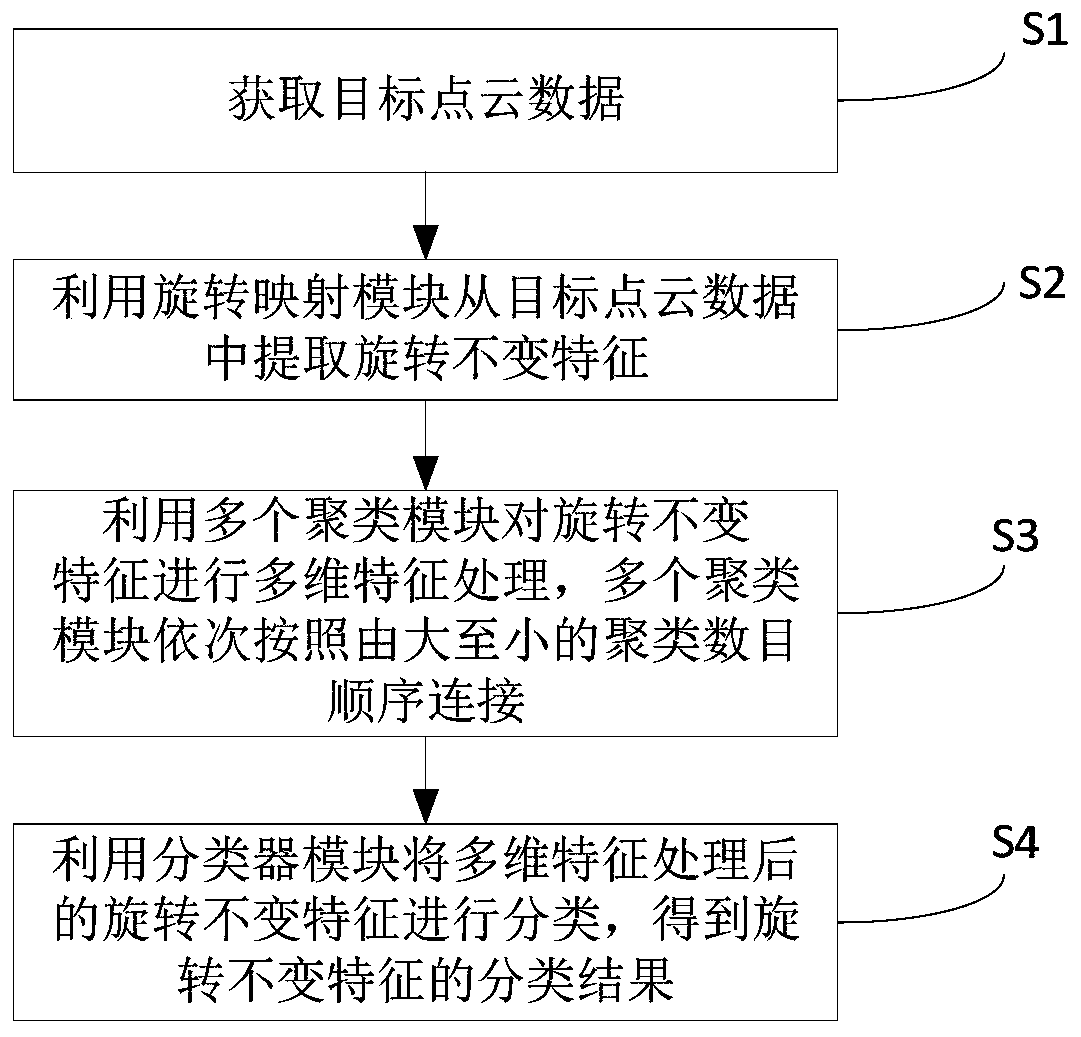
[0054] An embodiment of the present invention provides a feature processing method based on rotating point cloud data, such as figure 1 shown, including the following steps:
[0055] Step S1: Obtain target point cloud data. The target point cloud data here can be an image, and the image can be composed of many point clouds.
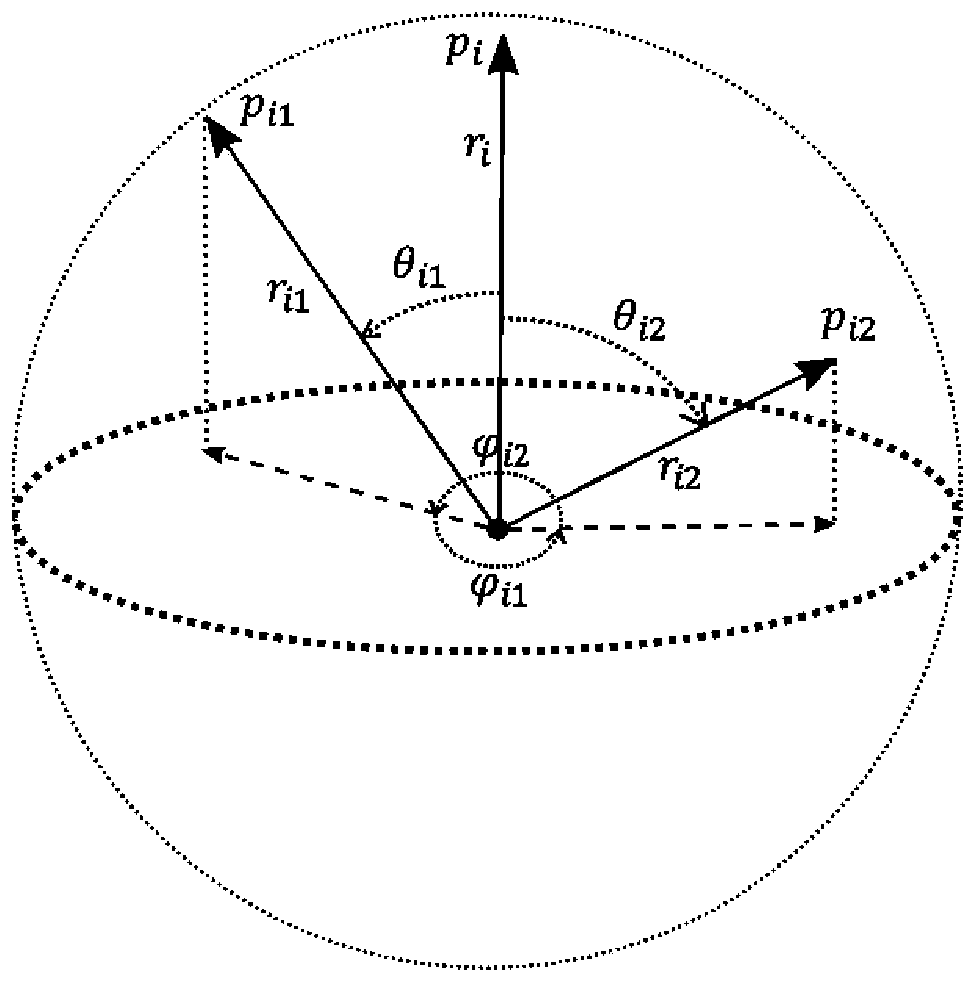
[0056] Step S2: Use the rotation mapping module to extract rotation invariant features from the target point cloud data. The rotation mapping module here is the RRI module, and the RRI module has been proved mathematically, which can ensure that the image data remains invariant during the rotation process, and that the image data will not be lost under normal conditions. Specifically, such as figure 2 As shown, the RRI module can be represented by the following formula for each point:
[0057]
[0058] The RRI module can represent the relative positional relationship between two points, in figure 2 p in i and p i1 can be represented by a vecto...
Embodiment 2
[0081] An embodiment of the present invention provides a feature processing device based on rotating point cloud data, such as Figure 8 shown, including:
[0082] An acquisition unit 81, configured to acquire target point cloud data.
[0083] The extraction unit 82 is configured to extract rotation-invariant features from the target point cloud data by using the rotation mapping module.
[0084] The multi-dimensional processing unit 83 is configured to use multiple clustering modules to perform multi-dimensional feature processing on the rotation-invariant features, and the multiple clustering modules are sequentially connected according to the number of clusters from large to small.
[0085] The classification unit 84 is configured to use a classifier module to classify the rotation-invariant features processed by the multi-dimensional features to obtain a classification result of the rotation-invariant features.
[0086] According to the feature processing device based on t...
Embodiment 3
[0101] An embodiment of the present invention provides a storage medium on which computer instructions are stored, and the steps of the method in Embodiment 1 are implemented when the instructions are executed by a processor. The storage medium also stores target point cloud data, rotation-invariant features, and the like. Wherein, the storage medium may be a magnetic disk, an optical disk, a read-only memory (Read-Only Memory, ROM), a random access memory (Random Access Memory, RAM), a flash memory (Flash Memory), a hard disk (Hard Disk Drive, abbreviated : HDD) or a solid-state hard drive (Solid-State Drive, SSD), etc.; the storage medium may also include a combination of the above-mentioned types of memory.
[0102] Those skilled in the art can understand that all or part of the processes in the methods of the above-mentioned embodiments can be completed by instructing related hardware through computer programs, and the programs can be stored in a computer-readable storage ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com