Observer-based filter control method for multi-arm manipulator output consistent adaptive command
A filter control and manipulator technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as failure, control system efficiency reduction, etc., and achieve the effect of eliminating needs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] Below in conjunction with specific embodiment, the present invention is further described:
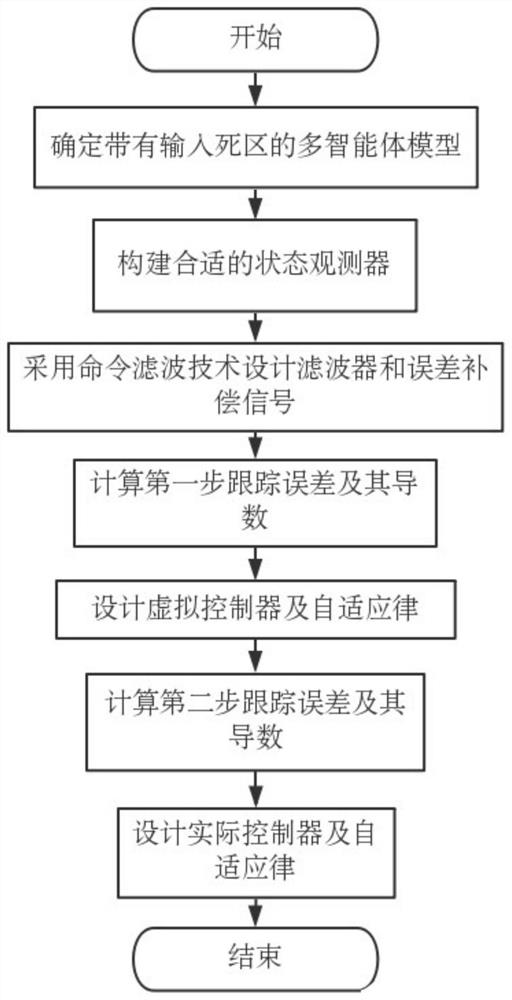
[0081] like figure 2 As shown, the observer-based multi-arm manipulator output consistent adaptive command filtering control method described in this embodiment includes the following steps:
[0082] S1: Model the single-arm manipulator;
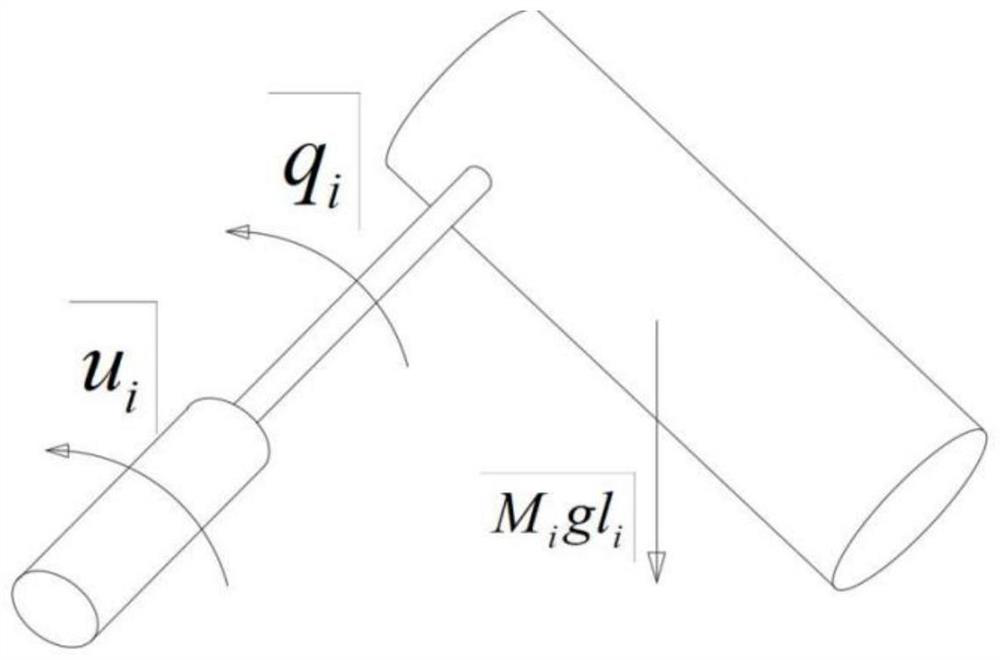
[0083] This embodiment adopts the currently widely used such as figure 1 For the single-arm manipulator shown, the equation model of the multi-single-arm manipulator is:
[0084]
[0085] In the above formula, i represents the ith single-arm manipulator, q i is the rotation angle, M i is the moment of inertia, m i is the mass of a single manipulator, l i is the length of the manipulator, g is the gravitational acceleration, for q i The second derivative of , D i (v i ) for the existing deadband input:
[0086]
[0087] The control objective of this embodiment is that the output of the multi-arm manipulator system can track a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com