Variable stiffness quadruped bionic quadruped robot flexible continuous body spine mechanism
A quadruped robot and continuum technology, applied in the field of robotics, can solve problems such as multi-degree-of-freedom bending and variable stiffness of multi-joints, and achieve the effects of improving flexibility and motion performance, reducing control difficulty, and eliminating energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Explanation of the name, the antagonistic type means that they are functionally antagonistic to each other, but also coordinate and depend on each other.
[0030]The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
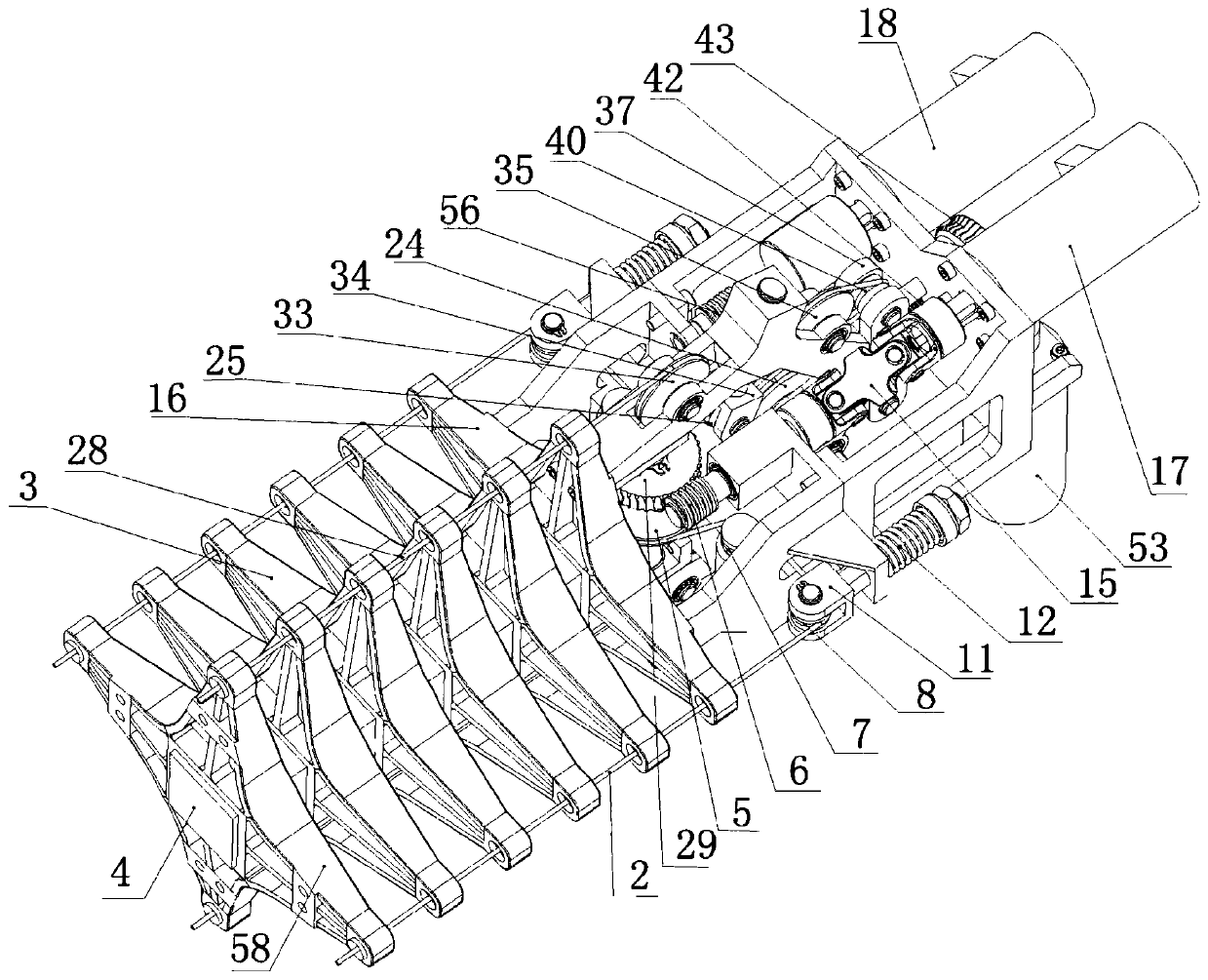
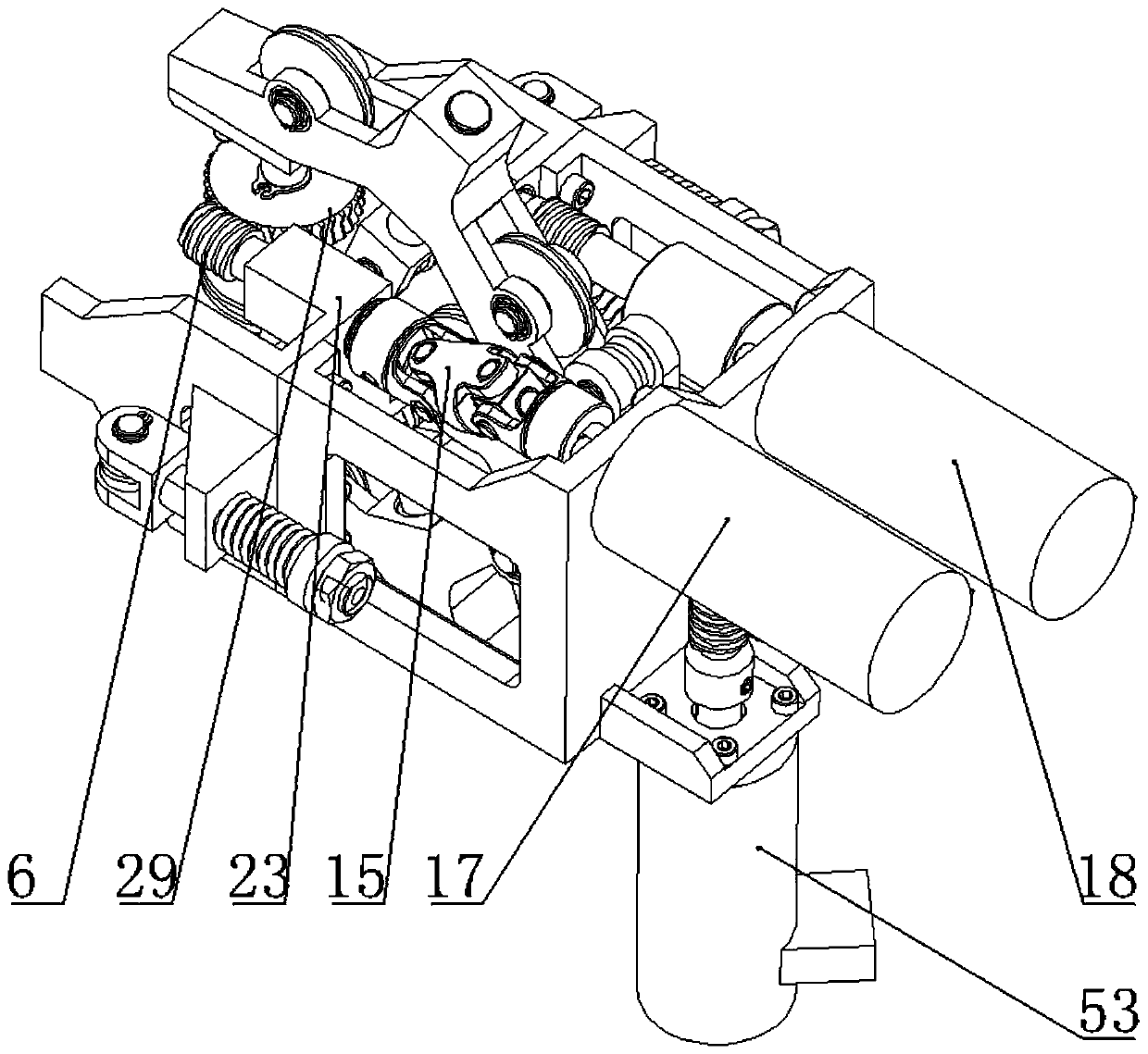
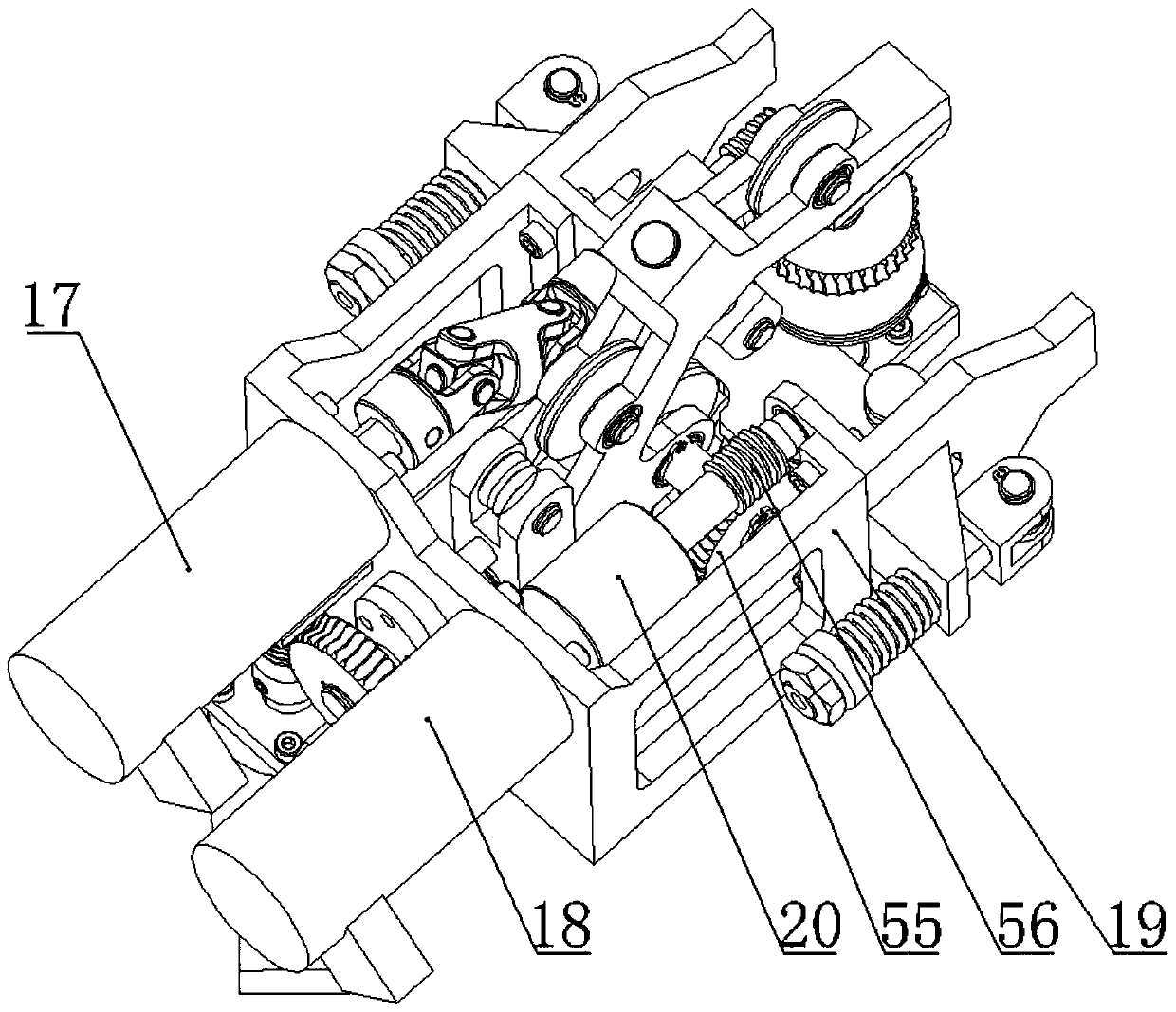
[0031] like Figure 1 to Figure 10 As shown, a flexible continuum spine mechanism of a bionic quadruped robot with variable stiffness of the present invention is mainly composed of two parts, including a continuum spine and a motor drive mechanism, wherein the motor drive mechanism is composed of two functional units, including lateral bending The quasi-antagonistic SEA motor drive unit, the longitudinal bending quasi-antagonist VSA motor drive unit, each part will be described in detail below.
[0032] Continuum spine: two cross-shaped rigid joint bracket base sections 16 with mounting base holes, joint bracket bottom section 58 and four joint bracket middle sections 3 are fixed on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com