Service robot movement system fault diagnosis method and device based on time sequence characteristics
A technology for robot motion and system failure, which is applied in measurement devices, neural learning methods, and testing of machine/structural components. Improve and other issues to achieve the effect of ensuring authenticity and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
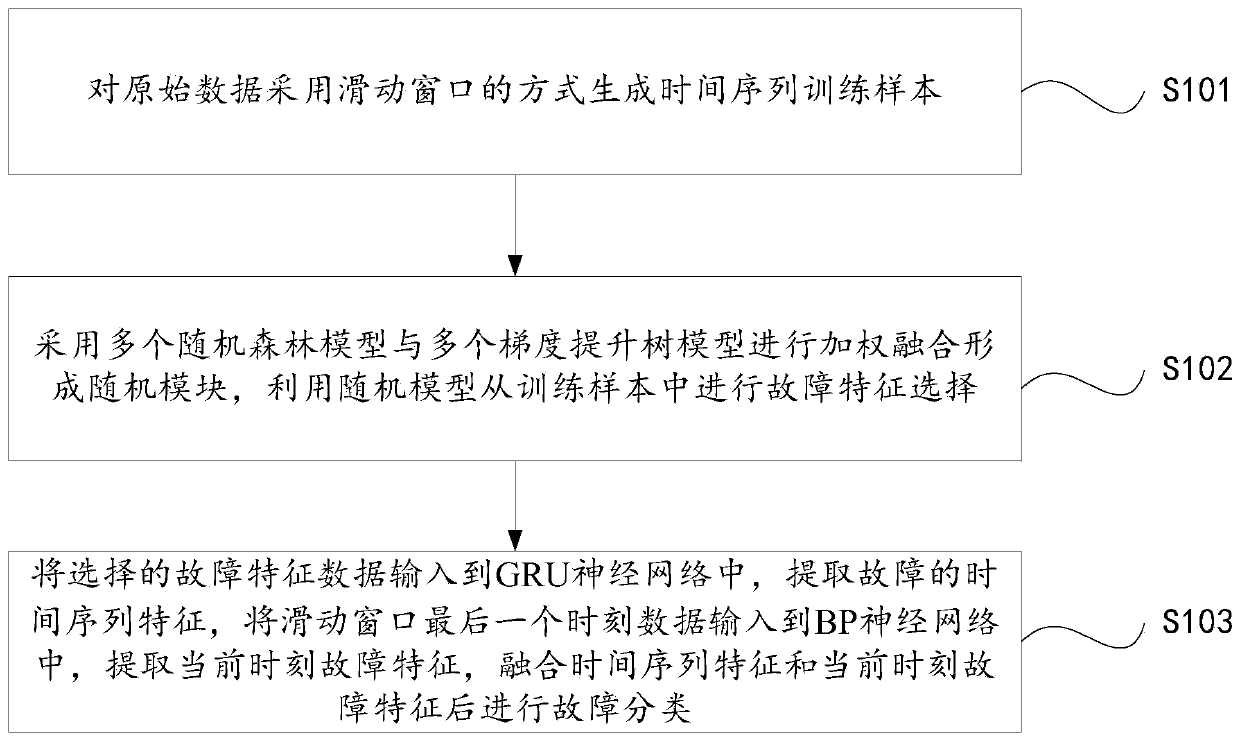
[0039] figure 1 It is a flowchart of a method for diagnosing faults in the kinematic system of a service robot based on time series features in this embodiment.
[0040] Such as figure 1 As shown, a time-series feature-based service robot motion system fault diagnosis method in this embodiment includes:
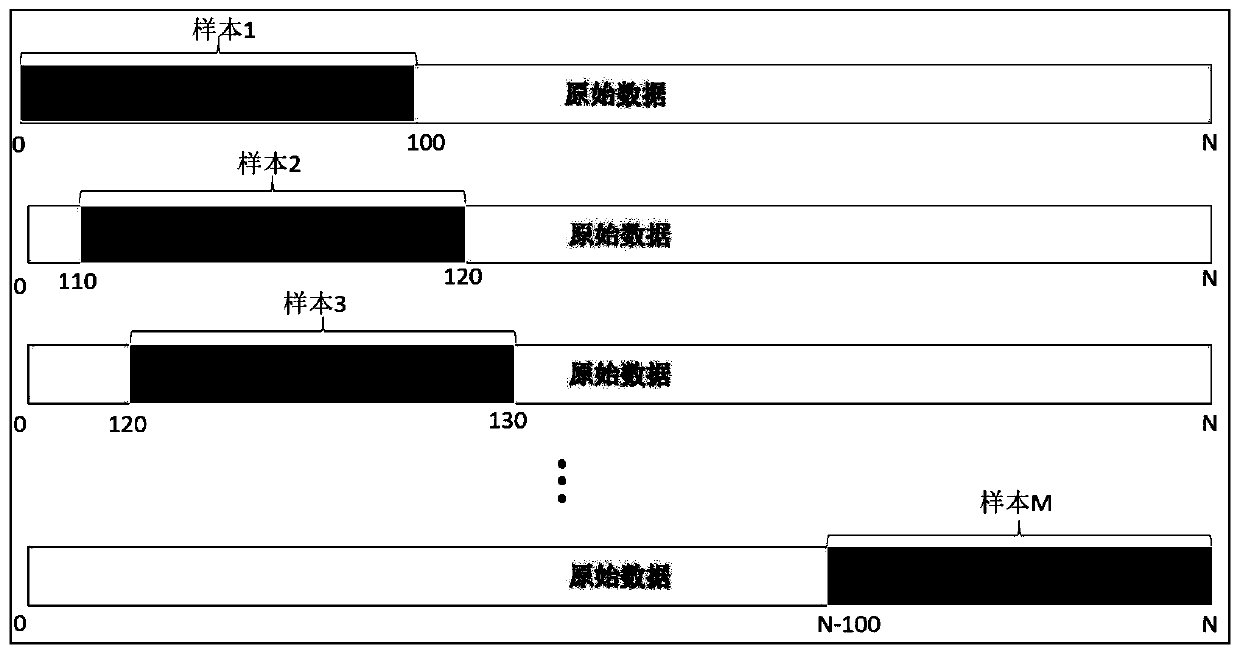
[0041] S101: Generating time series training samples in a sliding window manner for the original data.
[0042] Wherein, the raw data includes velocity, angular velocity and acceleration.
[0043] Different from the BP neural network, the neural network model based on time series has certain requirements on the format of the input data. The BP neural network only needs to concatenate the characteristic data into a vector and directly input it into the model. The neural network based on time series needs to input the characteristic data within a period of time into the model. The feature dimension is one more time dimension than the BP neural network. .
[0044] The speci...
Embodiment 2
[0084] Such as Figure 4 As shown, a time-series feature-based service robot motion system fault diagnosis device in this embodiment includes a cloud server and a robot-side detection device;
[0085] The cloud server includes:
[0086] A training sample generation module, which is used to generate time series training samples in the form of a sliding window to the original data; wherein, the original data includes velocity, angular velocity and acceleration;
[0087] A fault feature selection module, which is used to perform weighted fusion using multiple random forest models and multiple gradient boosting tree models to form a random module, and use the random model to select fault features from training samples;
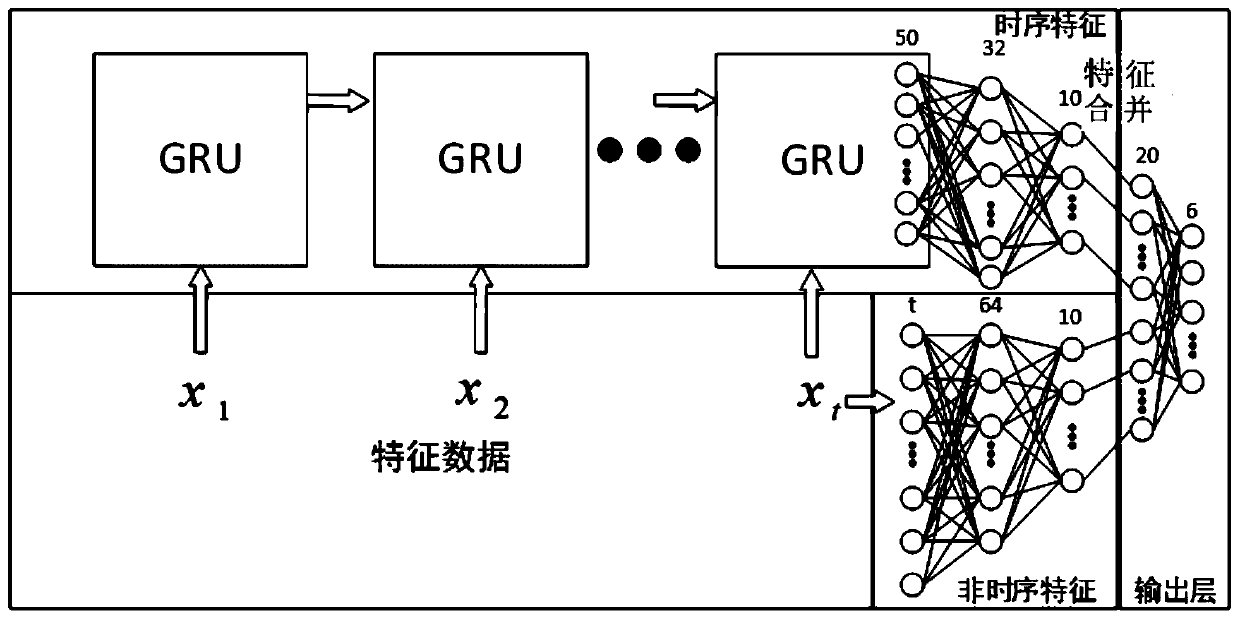
[0088] The fault classification module is used to input the selected fault feature data into the GRU neural network, extract the time series features of the fault, input the data at the last moment of the sliding window into the BP neural network, extract the fau...
Embodiment 3
[0100] This embodiment provides a computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the following figure 1 The steps in the service robot kinematic system fault diagnosis method based on time series features are shown.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com