Method and system for correcting magnetic pole position of motor rotor based on incremental encoder, and medium
An incremental encoder, magnetic pole position technology, applied in the field of mechanical control, can solve problems such as the increase of position deviation and the ineffective execution of motor control logic.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
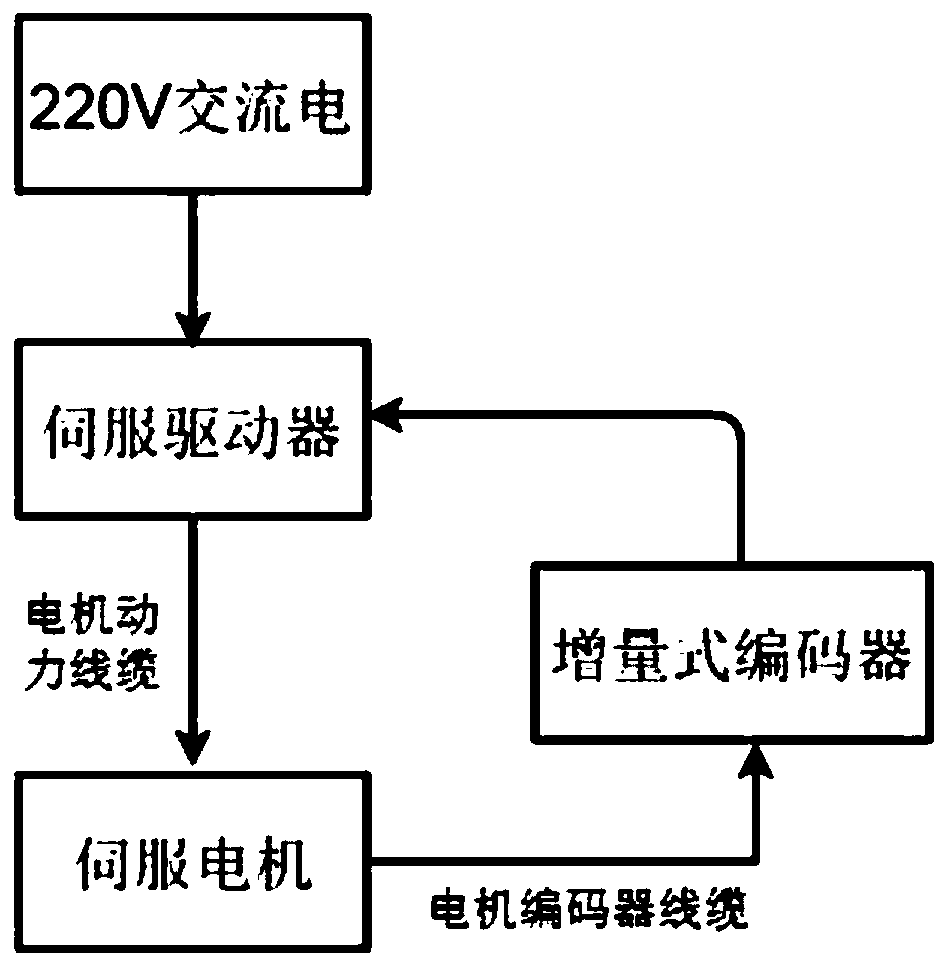
[0065] see figure 1 , Servo driver, composed of a driver board and a control board, controls the start and stop, speed, position, etc. of the servo motor, and performs various protections on the motor, such as overload, overvoltage, overcurrent, etc. It performs the following based on the incremental encoder Method for correcting motor rotor pole position. The servo motor, as a controlled object, can also be called the actuator of the servo drive. The incremental encoder converts the displacement of the motor rotor into a periodic electrical signal, and then converts this electrical signal into a counting pulse, which can calculate the rotor speed, angle, etc. through the number of pulses.
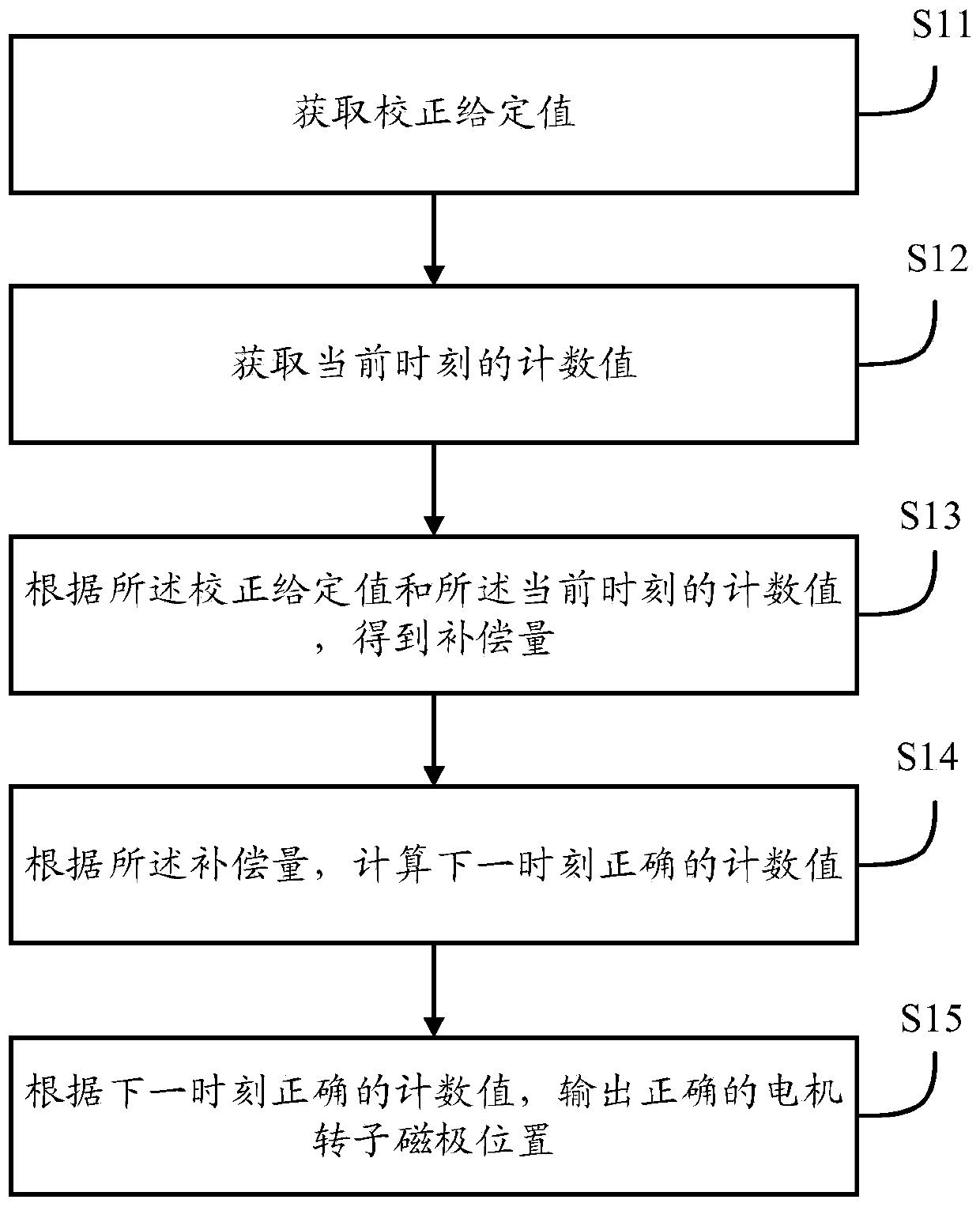
[0066] The embodiment of the present invention provides a method for correcting the magnetic pole position of the motor rotor based on an incremental encoder. The servo driver performs the correction of the magnetic pole position of the motor rotor based on an incremental encoder, or the ...
Embodiment 2
[0128] see Figure 14 In one embodiment, a system for correcting the magnetic pole position of the motor rotor based on an incremental encoder is provided, including a correction given value acquisition unit 61, a current count value acquisition unit 62, a compensation unit 63, a next moment count value acquisition unit 64 and Position determination unit 65 .
[0129] The correction given value acquisition unit 61 is used to acquire the correction given value.
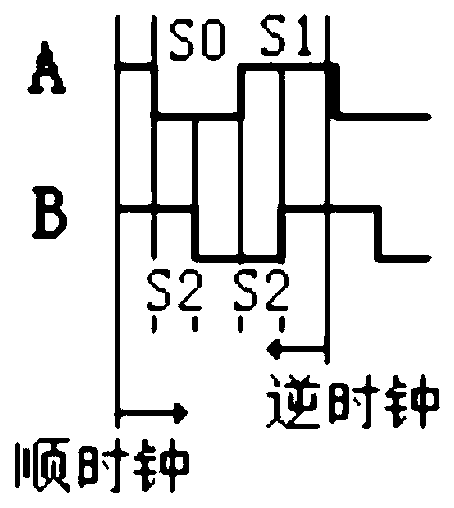
[0130] The current count value acquisition unit 62 is used to obtain the count value of the current moment, wherein, the count value is for the current moment, when the QEP circuit detects the Z pulse signal output of the incremental encoder, the counter is to the incremental encoder The value obtained by counting the output times of the AB pulse signal.
[0131] The compensation unit 63 is configured to obtain a compensation amount according to the correction given value and the count value at the current moment.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com