Quad-rotor unmanned aerial vehicle visual target tracking method based on binocular camera
A quad-rotor drone and binocular camera technology is applied in the field of visual target tracking of quad-rotor drones based on binocular cameras, which can solve the problem of poor tracking ability, affect the practicability of visual target tracking drones, and do not have long-term performance. Tracking ability and other issues, to achieve the effect of high precision, fast calculation speed and small delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0043] For the convenience of description, the relevant technical terms appearing in the specific implementation are explained first:
[0044] Offboard: external mode;
[0045] Tiny-Yolov3: Real-time target detection algorithm;
[0046] APCE (Average Peak-to Correlation Energy): a tracking quality judgment indicator;
[0047] SVM (Support Vector Machine): a nonlinear classifier algorithm based on supervised learning;
[0048] ORB (Oriebted Fast and Rotated BRIEF): an algorithm for fast feature point extraction and description;
[0049] EKF (Extended Kalman Filter): Kalman filter algorithm;
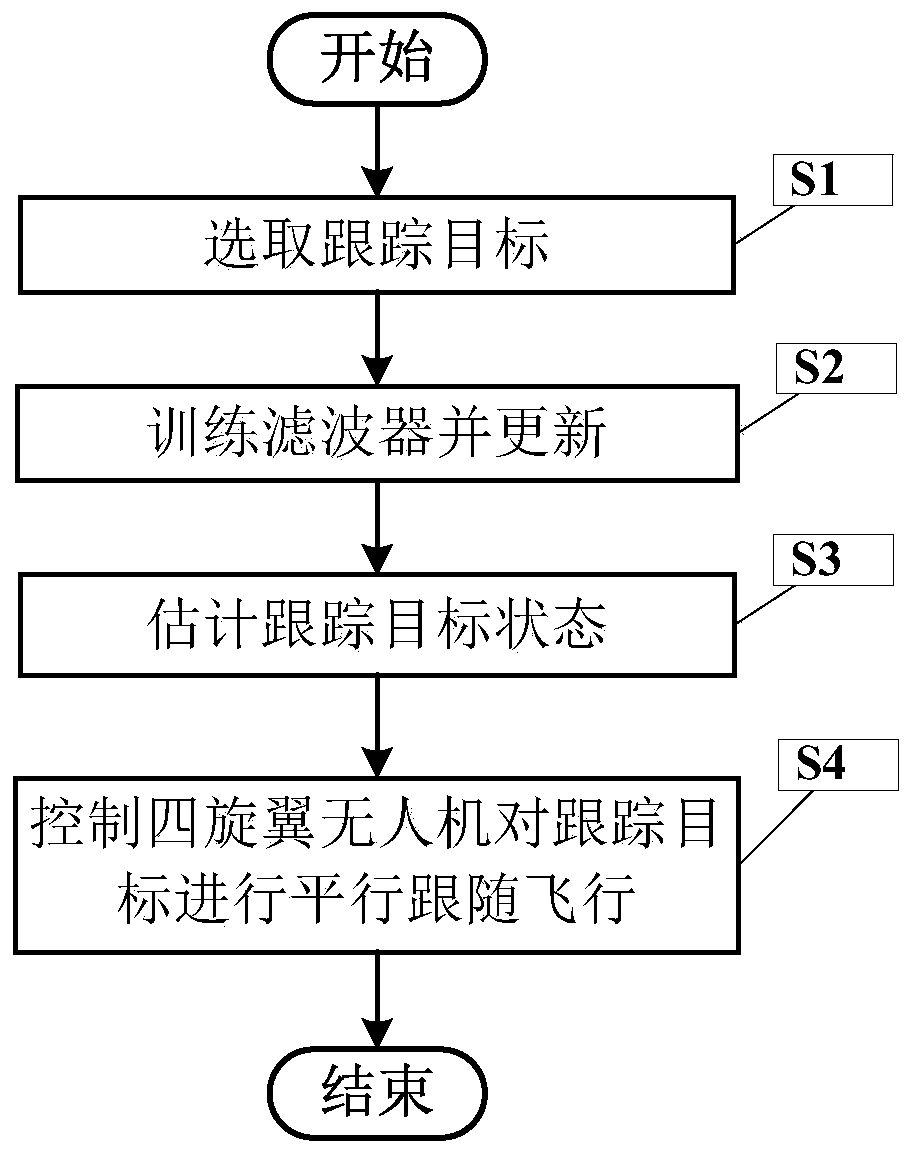
[0050] figure 1 It is a flow chart of the quadrotor UAV visual target tracking method based on the binocular camera of the present invention.
[0051] In this example, if figure 1 Shown, a kind of quadrotor unmanned aerial vehicle visual target tracking method based on binocular camera of the present invention comprises the following steps:
[0052] S1. Select the tracking target
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com