Real-time field robot visual navigation method based on FPGA and real-time field robot visual navigation system based on FPGA
A technology of robot vision and navigation method, which is applied in the field of real-time field robot vision navigation, and can solve the problems that are not necessarily applicable, stay in the stage of offline image processing, and start research late.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
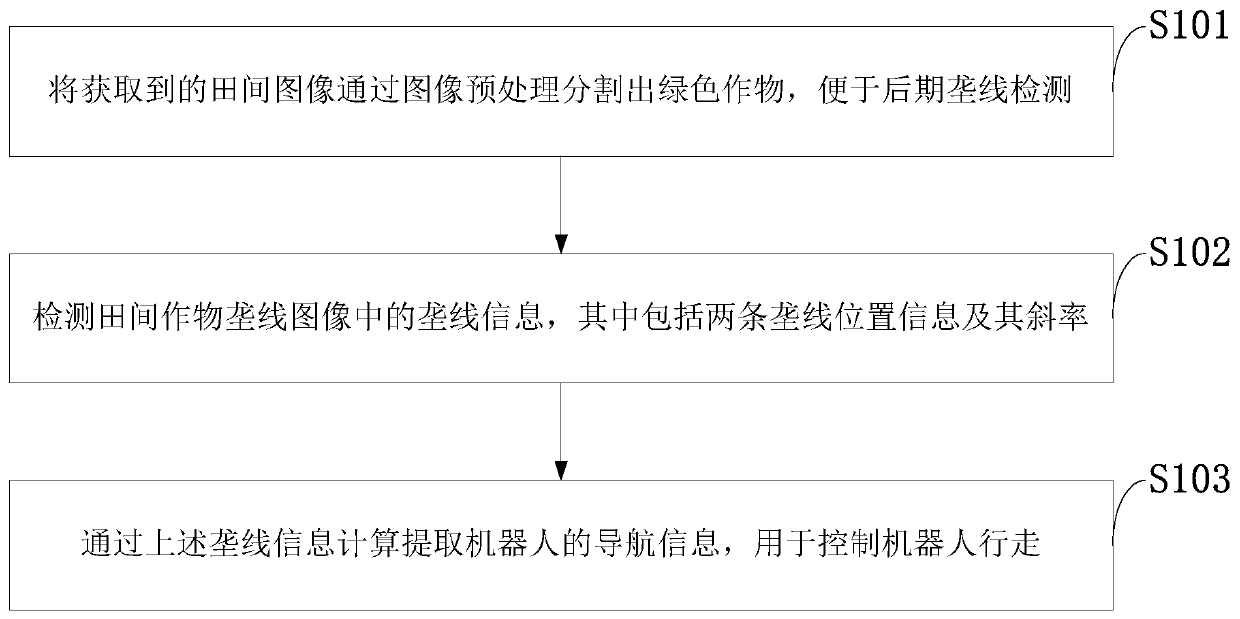
[0136] In order to make the purpose, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
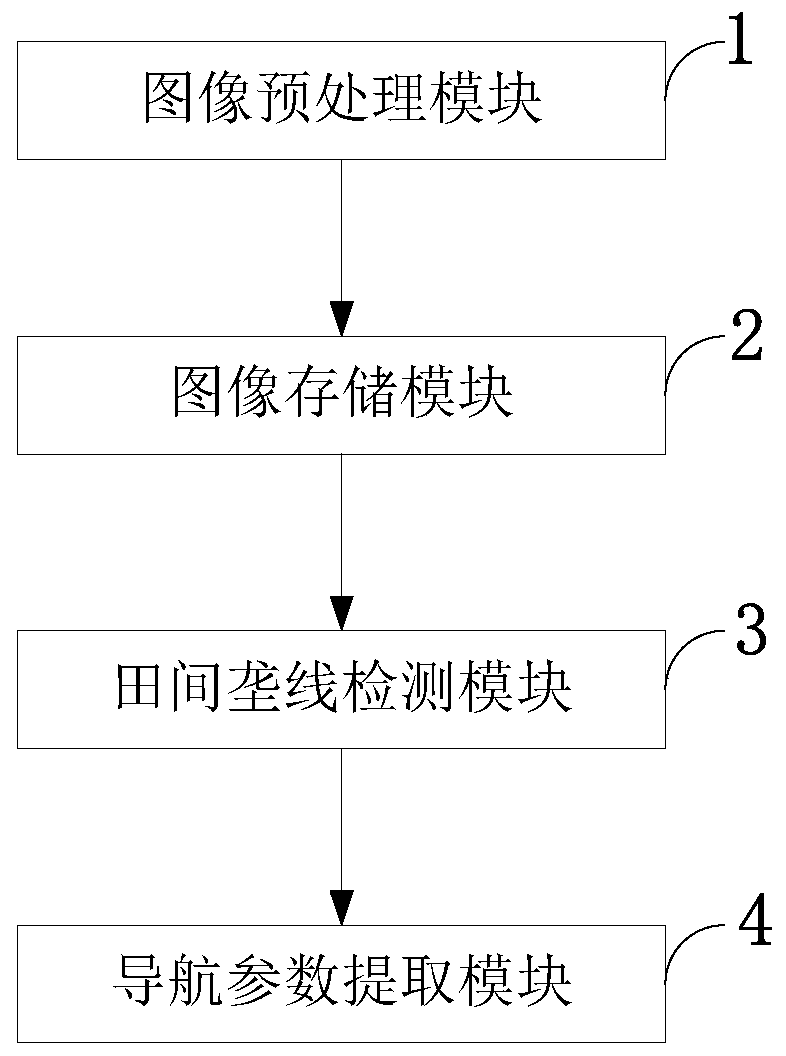
[0137] Most of the existing vision-based field ridge line detection algorithms are implemented in the case of offline and low-resolution images, which are not necessarily applicable to real-time high-resolution ridge line detection in complex natural environments; so far, few scholars Combining FPGA acceleration methods with agricultural vision image processing methods or agricultural navigation algorithms; traditional ridge line extraction methods are offline and non-real-time, and cannot effectively control robot actions; current field robot navigation based on binocular vision The main difficulty of the algorithm lies in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com