Time window-based task segmentation multi-AGV path planning algorithm
A path planning and time window technology, applied in navigation calculation tools, two-dimensional position/course control, vehicle position/route/altitude control, etc., can solve problems such as low efficiency, long running time, and too many path turns
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
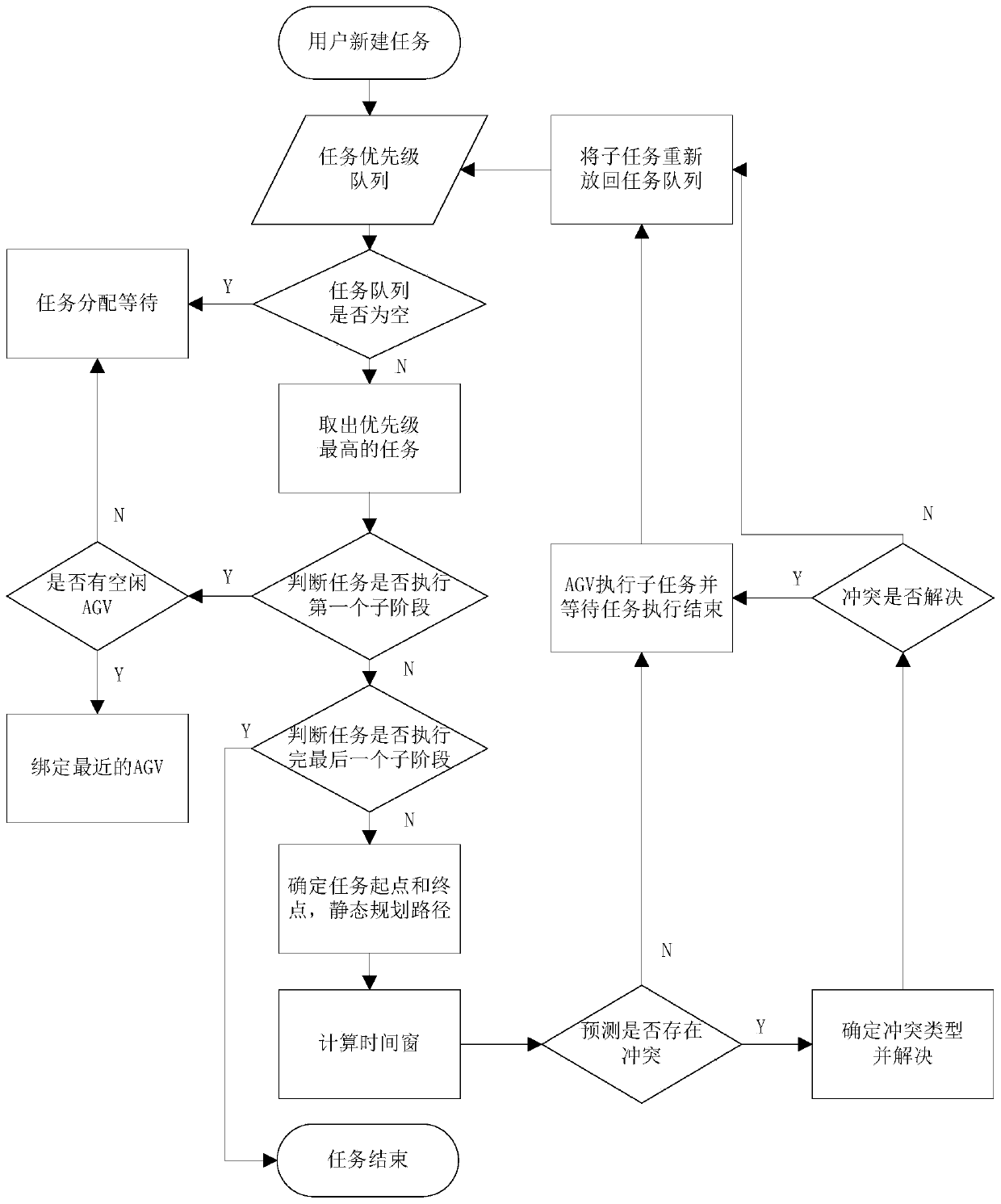
[0061] Such as figure 1 As shown, the multi-AGV path planning algorithm based on the task segmentation of the time window of the present invention comprises the following steps:
[0062] The first step is to use the topological map to generate the AGV working environment model. The topological map includes points and edges, and the edges are divided into straight lines and arc edges;
[0063] The second step, task generation, decomposes the task into multiple sub-phases according to different task types;
[0064] The third step is task assignment. The task assignment module assigns tasks according to the task priority. After the scheduling system takes out the task from the high-priority queue, it first judges which stage the task is executed. If the task is not executed, it needs to adopt the improved A * The algorithm determines the AGV closest to the starting point of the task, assigns the task to the AGV, and sets the AGV to the working state, and sets the task state to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com