Development system for original model of automatic driving system
An autonomous driving, original model technology, applied in control/regulation systems, non-electric variable control, character and pattern recognition, etc., can solve problems such as time-consuming and troublesome operation, achieve flexible and rapid development, and improve development efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
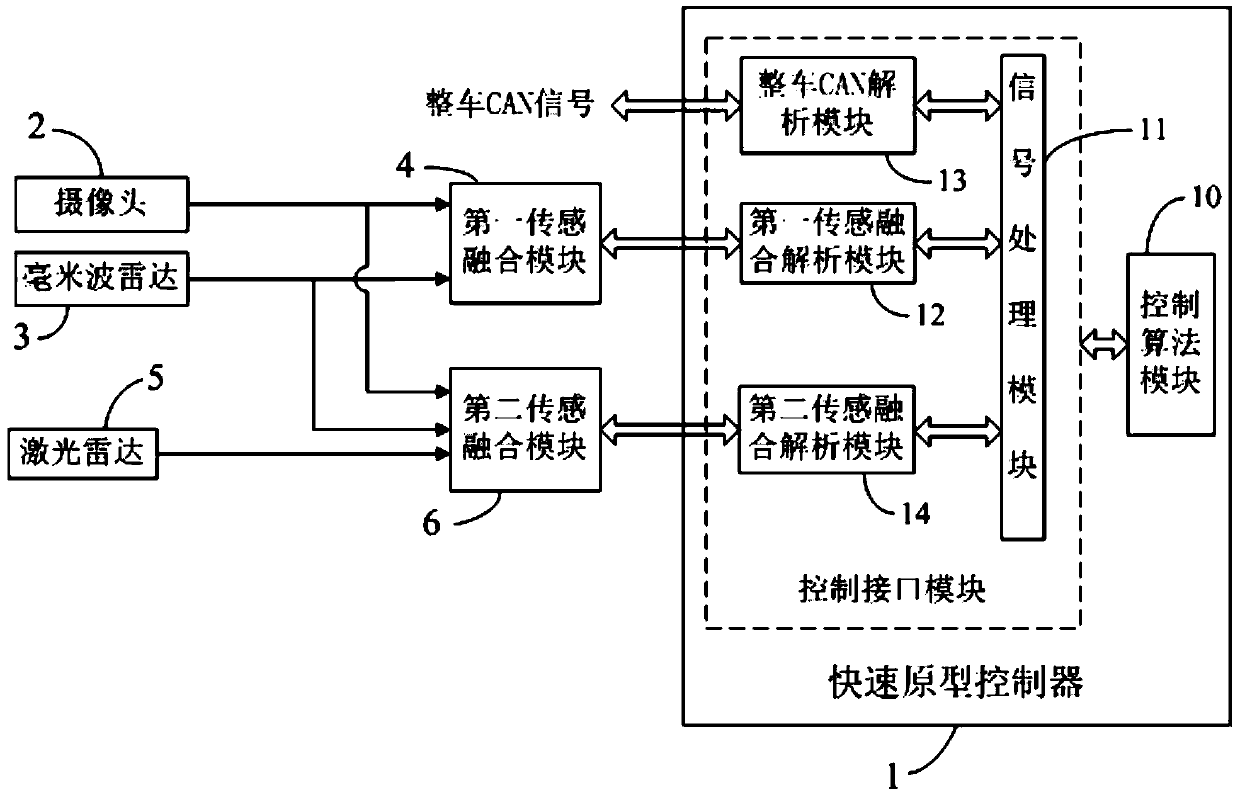
[0018] Embodiment 1: as figure 1The original model development system of the automatic driving system shown, including a rapid prototype controller 1, a camera 2, a millimeter wave radar 3, a laser radar 5, a first sensor fusion module 4 and a second sensor fusion module 6, the rapid prototype control The device 1 is integrated with a control algorithm module 10, a signal processing module 11, a first sensor fusion analysis module 12, a second sensor fusion analysis module 14 and a vehicle CAN analysis module 13, the signal processing module 11, the first sensor fusion analysis module The analysis module 12, the second sensor fusion analysis module 14 and the vehicle CAN analysis module 13 form a control interface module; the first sensor fusion module 4 carries out the lane line and obstacle information respectively detected by the camera 2 and the millimeter wave radar 3 Fusion, the first sensor fusion analysis module 12 receives and analyzes the fusion information sent by t...
Embodiment 2
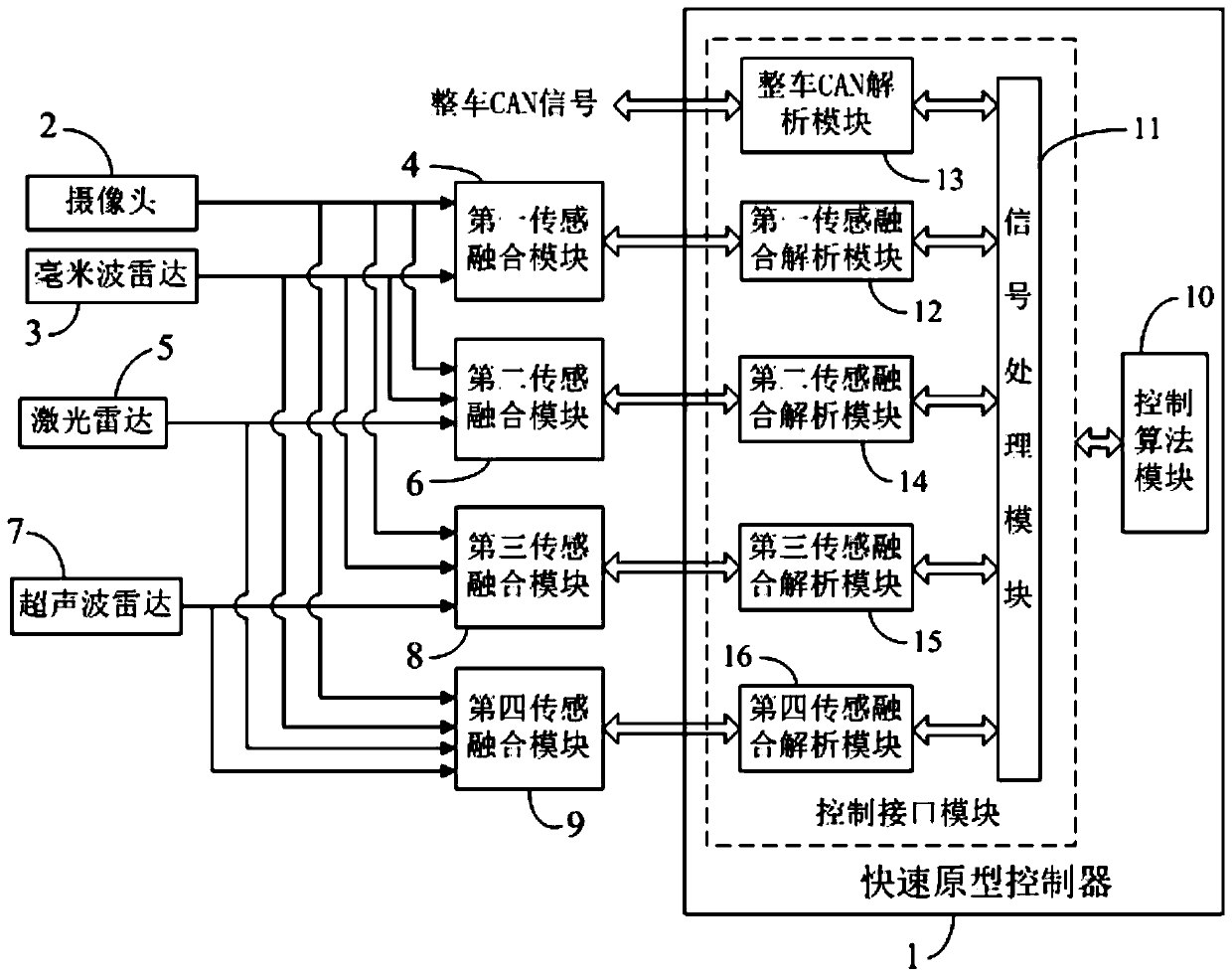
[0021] Embodiment 2: as image 3 The original model development system of the automatic driving system shown, including rapid prototyping controller 1, camera 2, millimeter wave radar 3, laser radar 5, ultrasonic radar 7, first sensor fusion module 4, second sensor fusion module 6 , the third sensing fusion module 8, the fourth sensing fusion module 9, the rapid prototyping controller 1 is integrated with a control algorithm module 10, a signal processing module 11, a first sensing fusion analysis module 12, a second sensing fusion analysis Module 14, the third sensor fusion analysis module 15, the fourth sensor fusion analysis module 16 and the vehicle CAN analysis module 13, the signal processing module 11, the first sensor fusion analysis module 12, the second sensor fusion analysis module 14 , the third sensor fusion analysis module 15, the fourth sensor fusion analysis module 16 and the vehicle CAN analysis module 13 form a control interface module; the first sensor fusio...
Embodiment 3
[0024] Embodiment 3: as Figure 5 The original model development system of the automatic driving system shown, including rapid prototyping controller 1, camera 2, millimeter wave radar 3, laser radar 5, ultrasonic radar 7, high-precision map 20, the first sensor fusion module 4, the second The sensor fusion module 6 and the third sensor fusion module 8, the rapid prototype controller 1 is integrated with a control algorithm module 10, a signal processing module 11, a first sensor fusion analysis module 12, a second sensor fusion analysis module 14, The third sensor fusion analysis module 15 and the vehicle CAN analysis module 13, the signal processing module 11, the first sensor fusion analysis module 12, the second sensor fusion analysis module 14, the third sensor fusion analysis module 15 and the vehicle The CAN analysis module 13 forms a control interface module; the first sensor fusion module 4 fuses the lane line and obstacle information detected by the camera 2 and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com