Four-wheel-driven all-weather driverless patrol car system
A four-wheel drive, unmanned driving technology, applied in the direction of motor vehicles, signal transmission systems, control/regulation systems, etc., can solve the problem of the performance degradation of lidar, the large length of the DC motor of the patrol car, and the impact on the judgment of the unmanned patrol car And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
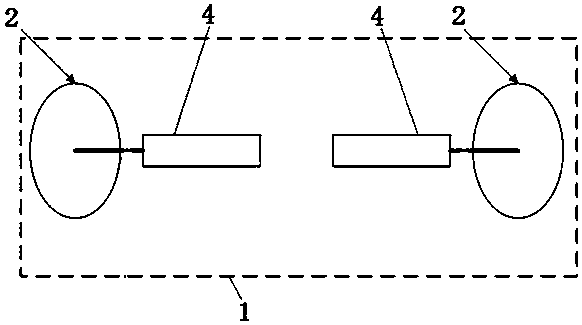
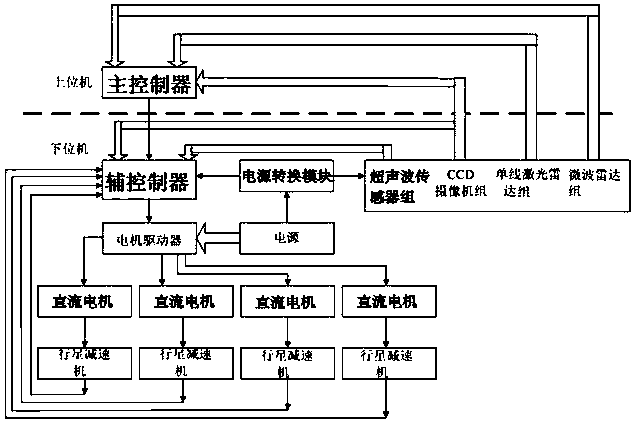
[0091] Such as Figure 1 to Figure 5 As shown, a four-wheel drive all-weather unmanned patrol car system includes a patrol car body 1 and a control system arranged on the patrol car body 1; A pair of driving wheels 2 are assembled, and four DC motors 4 for respectively driving the four driving wheels 2 are installed inside the patrol car body 1 . The inside of the patrol car body 1 is equipped with four DC motors 4 for respectively driving the four drive wheels 2; the inside of the patrol car body 1 is also provided with four planetary reducers 5 which are respectively located outside the motor shafts of the four DC motors 4, The planetary reducer 5 is a 90-degree angular planetary reducer; the length direction of the four DC motors 4 extends in the direction of the length of the patrol car body 1, and the four DC motors 4 are located on the inside of the four drive wheels 2; The DC motor 4 is a rare earth permanent magnet brushless DC servo motor. The stator of the rare eart...
Embodiment 2
[0132] Such as Figure 1 to Figure 5 As shown, a four-wheel drive all-weather unmanned patrol car system includes a patrol car body 1 and a control system arranged on the patrol car body 1; A pair of driving wheels 2 are assembled, and four DC motors 4 for respectively driving the four driving wheels 2 are installed inside the patrol car body 1 . The inside of the patrol car body 1 is equipped with four DC motors 4 for respectively driving the four drive wheels 2; the inside of the patrol car body 1 is also provided with four planetary reducers 5 which are respectively located outside the motor shafts of the four DC motors 4, The planetary reducer 5 is a 90-degree angular planetary reducer; the length direction of the four DC motors 4 extends in the direction of the length of the patrol car body 1, and the four DC motors 4 are located on the inside of the four drive wheels 2; The DC motor 4 is a rare earth permanent magnet brushless DC servo motor. The stator of the rare eart...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com