Four-limb exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as difficult and complicated operation, no upper limb mechanism, and no motor drive for ankle joints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The following is a detailed description of the embodiments of the present invention: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operation processes. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
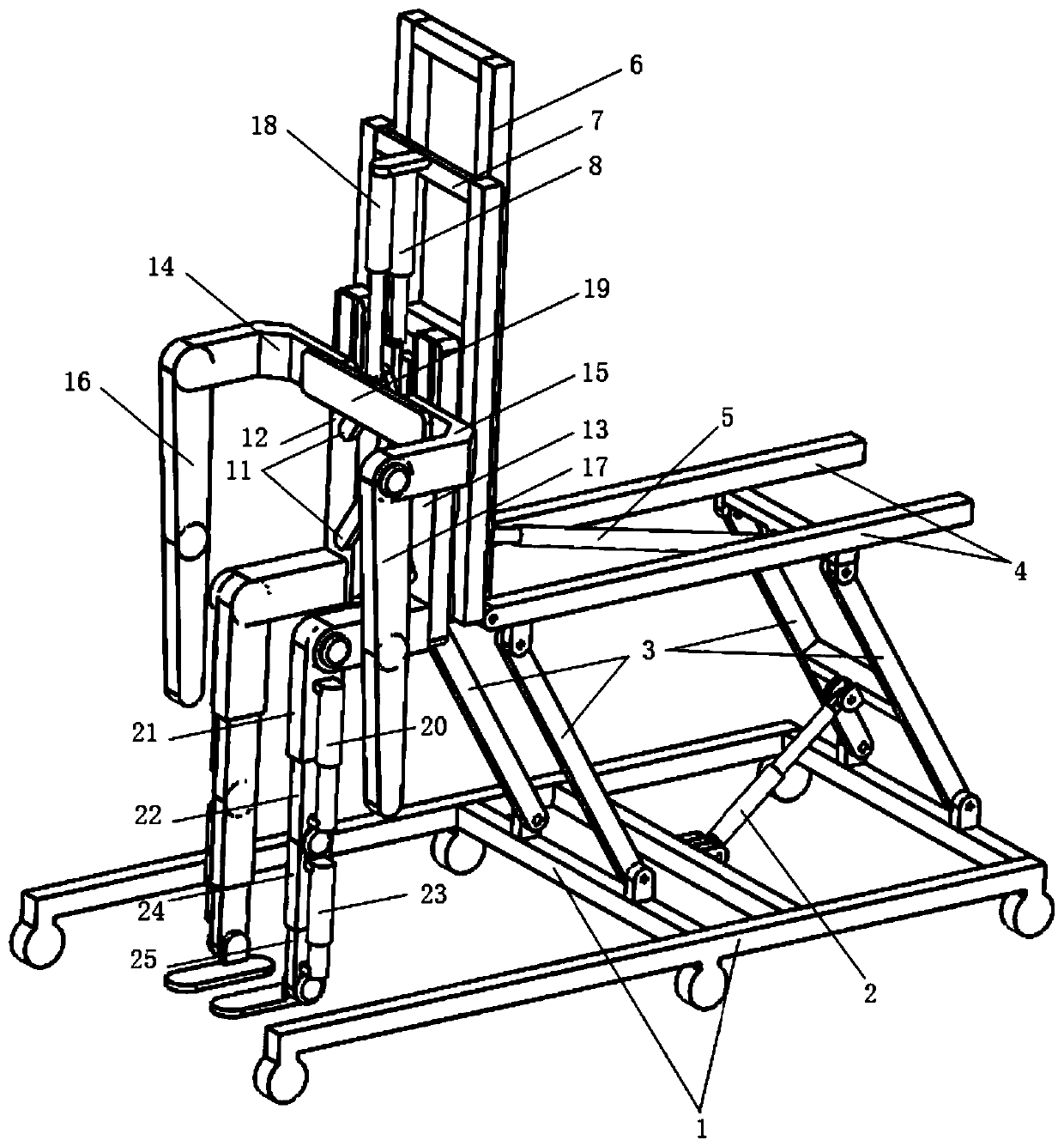
[0071] Please also see Figure 1 to Figure 11 .
[0072] The overall schematic diagram of the limb exoskeleton rehabilitation robot: figure 1 As shown, in addition, the skeletal robot is divided into the exoskeleton structure of the limbs and the bed part that can be lifted and turned over.
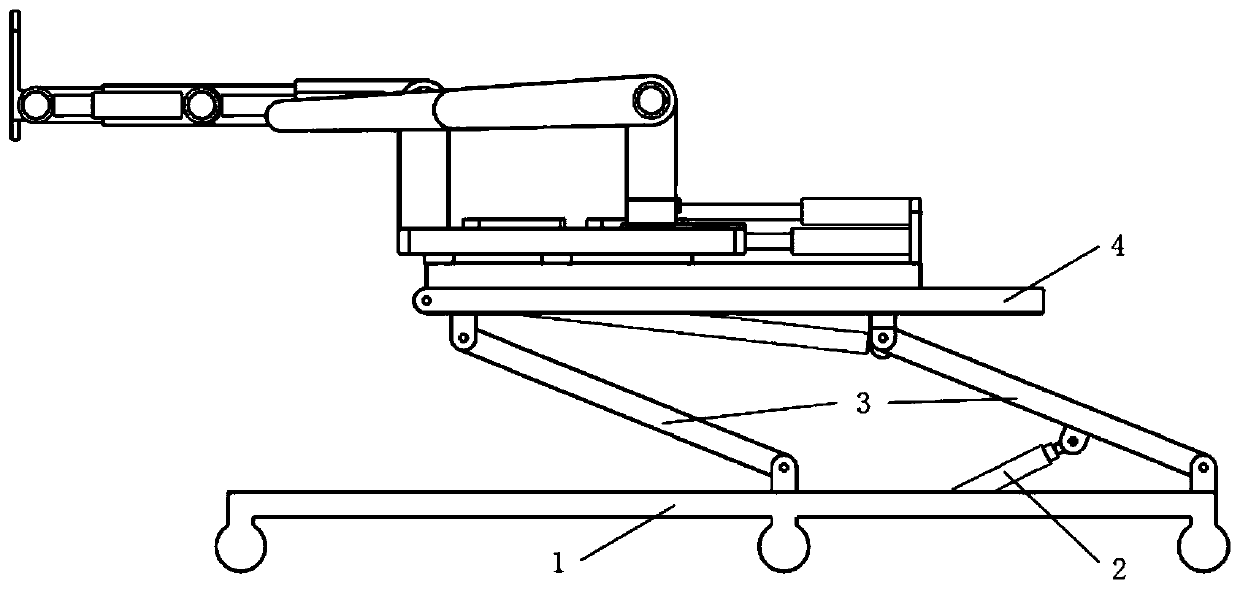
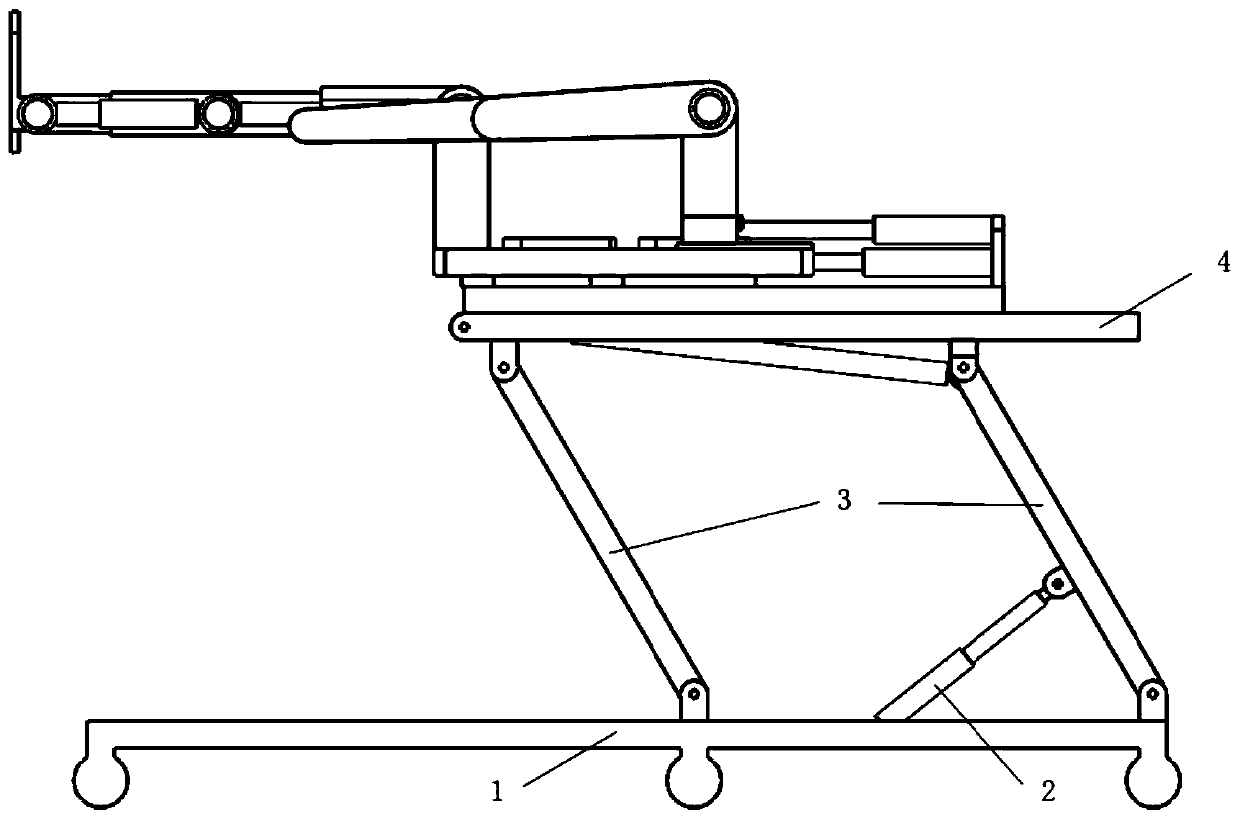
[0073] In some embodiments of the present invention, the schematic diagram of chassis movement is as follows figure 2 and image 3 As shown, one end of the push rod motor 2 for robot lifting i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com