Control method and system for open-loop iterative learning based on fractional calculus
A technology of fractional calculus and iterative learning control, which is applied to control systems, vector control systems, and control generators, etc., and can solve problems such as large amount of fractional calculus calculations and difficulties in implementing microprocessors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
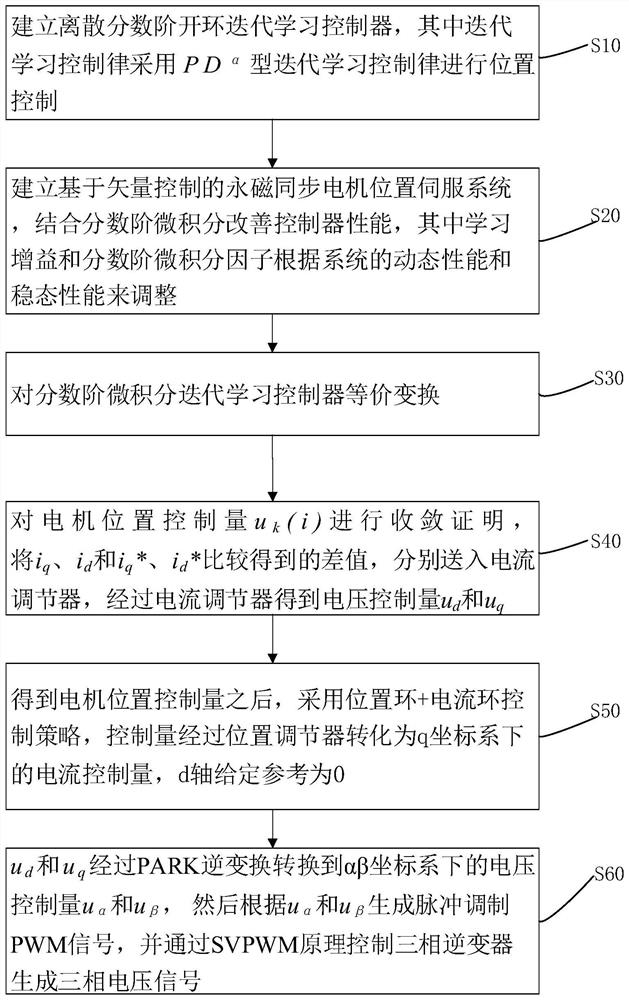
[0075] see figure 1 , the technical solution of the present invention that is the embodiment of the present invention is the flow chart of the steps of the control method of the open-loop iterative learning based on fractional calculus, comprising the following steps:
[0076] S10, establishing a discrete fractional order open-loop iterative learning controller, wherein the iterative learning control law adopts PD α Type iterative learning control law for position control;
[0077] S20, establish a permanent magnet synchronous motor position servo system based on vector control, and improve controller performance by combining fractional calculus, wherein the learning gain and fractional calculus factors are adjusted according to the dynamic performance and steady-state performance of the system;
[0078] S30, iteratively learning controller equivalent transformation for fractional calculus;
[0079] S40, the motor position control value u k (i) To prove the convergence, put...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com