Indoor service robot controller design method under visual dynamic system and system
A service robot and dynamic system technology, applied in the field of indoor service robot forgetting factor PD type iterative learning controller, to achieve fast and accurate tracking tasks, increase error correction items, and improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0043] This embodiment provides a design method of an indoor service robot controller under a visual dynamic system, and constructs a forgetting factor PD type iterative learning controller with the help of a visual dynamic system.
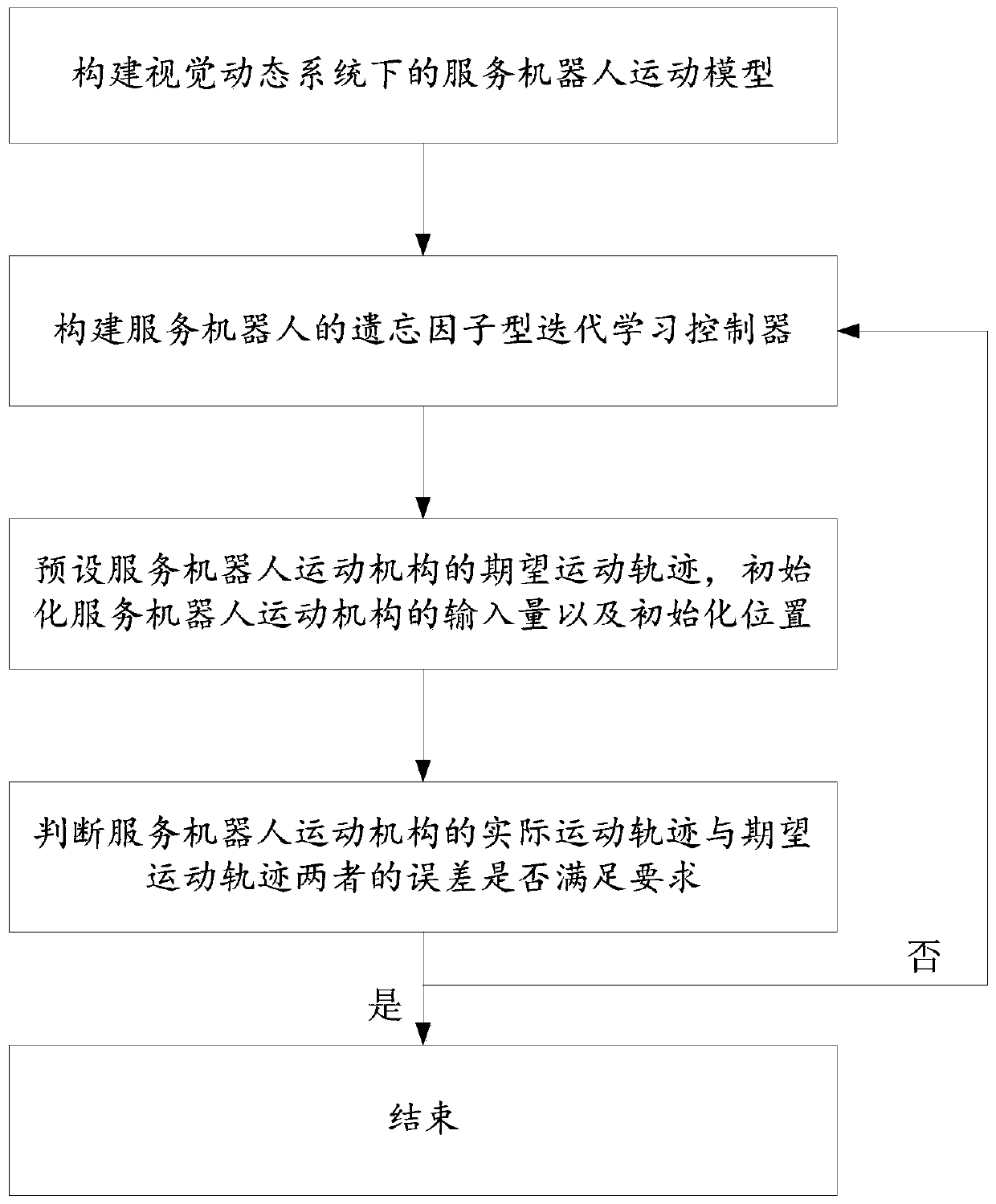
[0044] Please refer to the attached figure 1 , the design method of the indoor service robot controller includes the following steps:
[0045] S101, the selected service robot is set as a mass point, and a motion model of the service robot under the visual dynamic system is constructed.
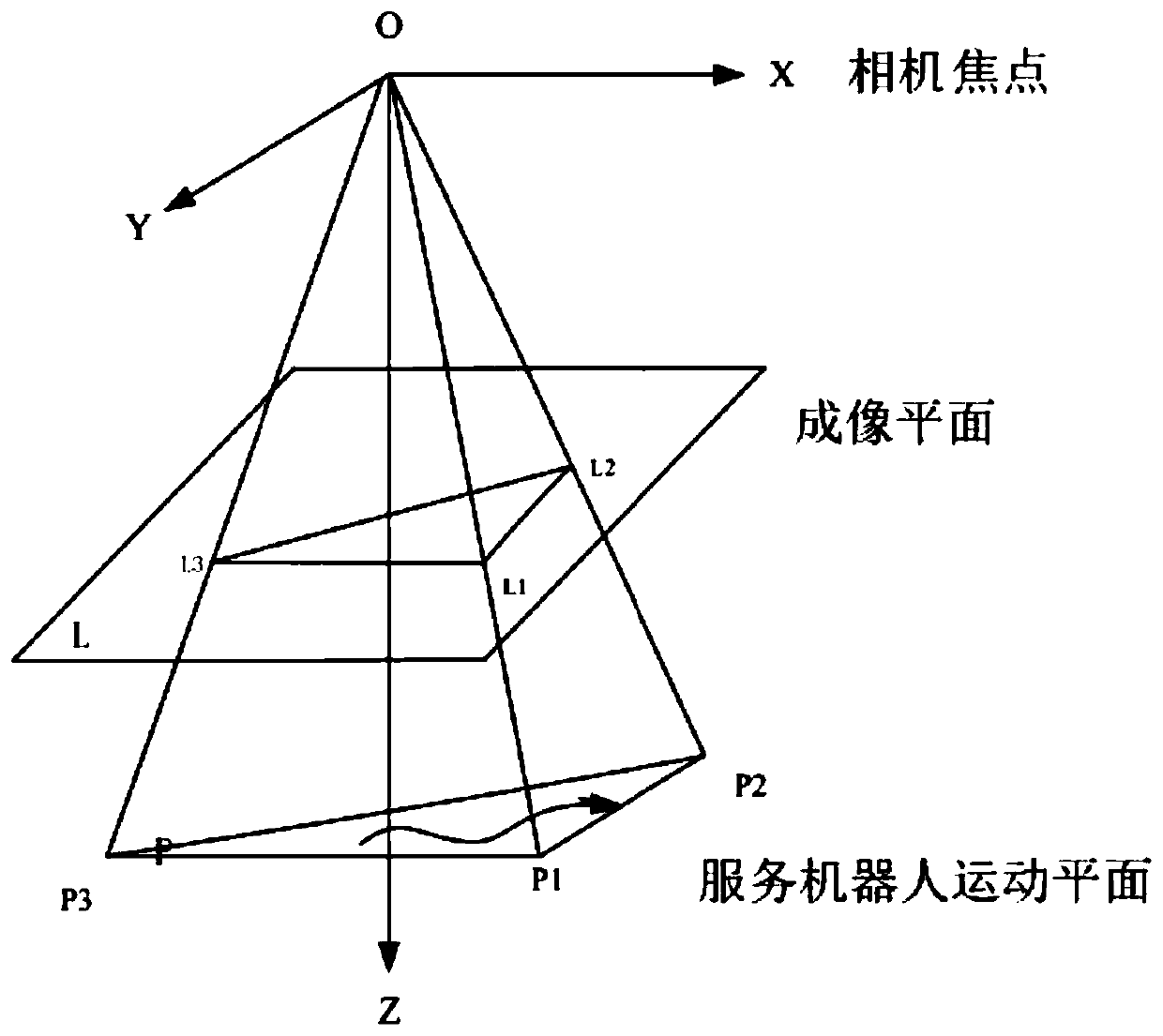
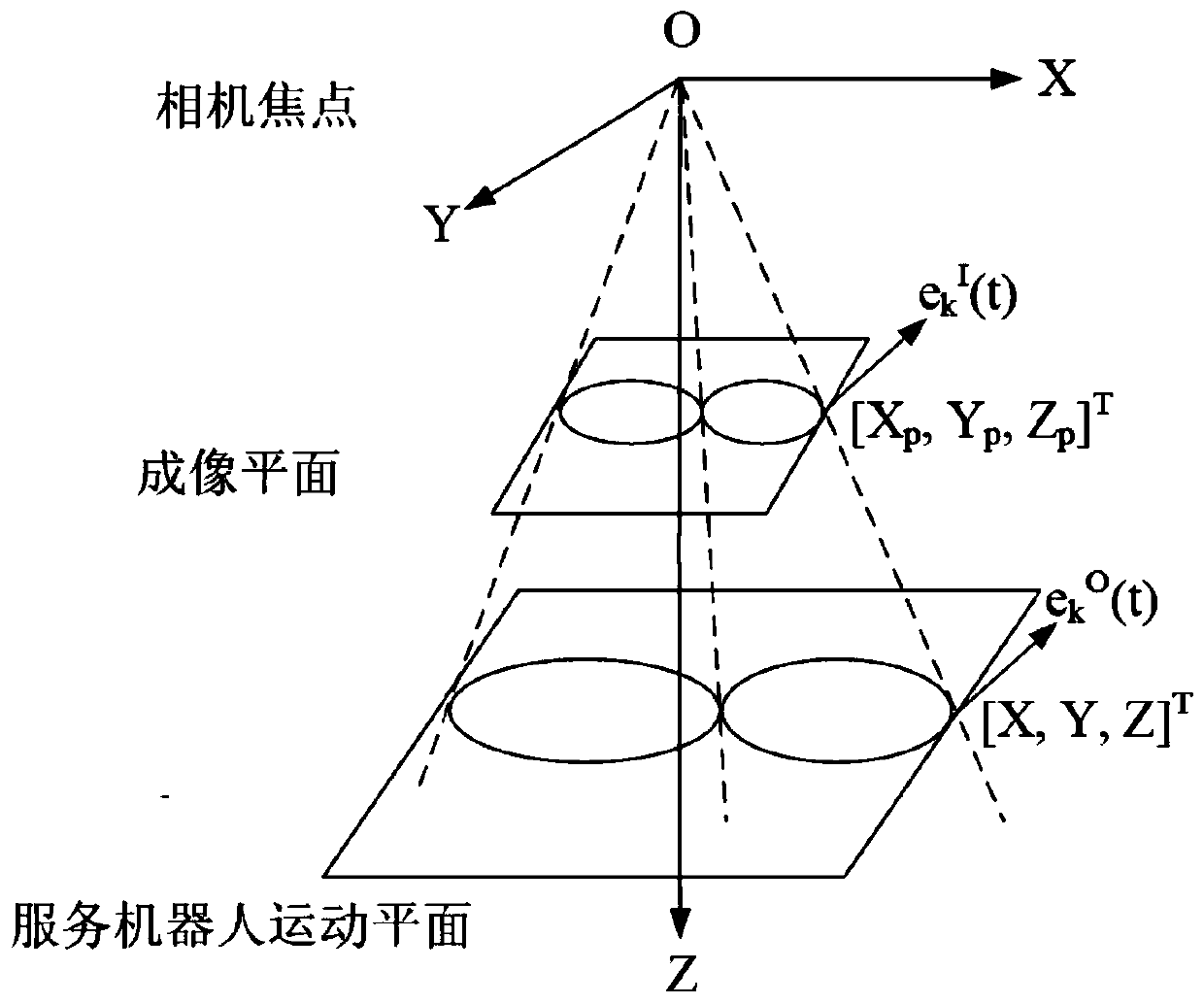
[0046] The movement of the service robot is done under the visual dynamic system, please refer to the attached figure 2 , consisting of a service robot motion plane and a camera, the service robot motion model under the visual dynamic system is as follows:
[0047]
[0048] can be simplified to:
[0049]
[0050] Among them, matrices A and B are state matrices, which can be constructed according to the visual dynamic system, δ 1 (t) is the perturbation...
Embodiment 2
[0081] This embodiment provides a design system for an indoor service robot controller under a visual dynamic system, the system includes:
[0082] The motion model building block is used to construct the motion model of the service robot under the visual dynamic system;
[0083] The controller building block is used to construct the forgetting factor PD type iterative learning controller of the service robot;
[0084] The initialization module is used to preset the desired motion trajectory of the service robot's motion mechanism, initialize the input amount and the initialization position of the service robot's motion mechanism;
[0085] The judging module is used to judge whether the error between the actual motion trajectory and the expected motion trajectory of the service robot’s motion mechanism meets the requirements. If the requirements are met, the actual motion trajectory of the service robot coincides with the expected motion trajectory; otherwise, repeat the above...
Embodiment 3
[0087] This embodiment provides a computer-readable storage medium, on which a computer program is stored. When the program is executed by a processor, the steps in the above-mentioned method for designing an indoor service robot controller under a visual dynamic system are implemented.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com