Power patrol drone radar altimeter system
A technology for power line inspection and unmanned aerial vehicles, applied in radio wave measurement systems, radio wave reflection/re-radiation, utilization of re-radiation, etc., can solve problems such as heavy workload, ensure accuracy and increase data stability effect with continuity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
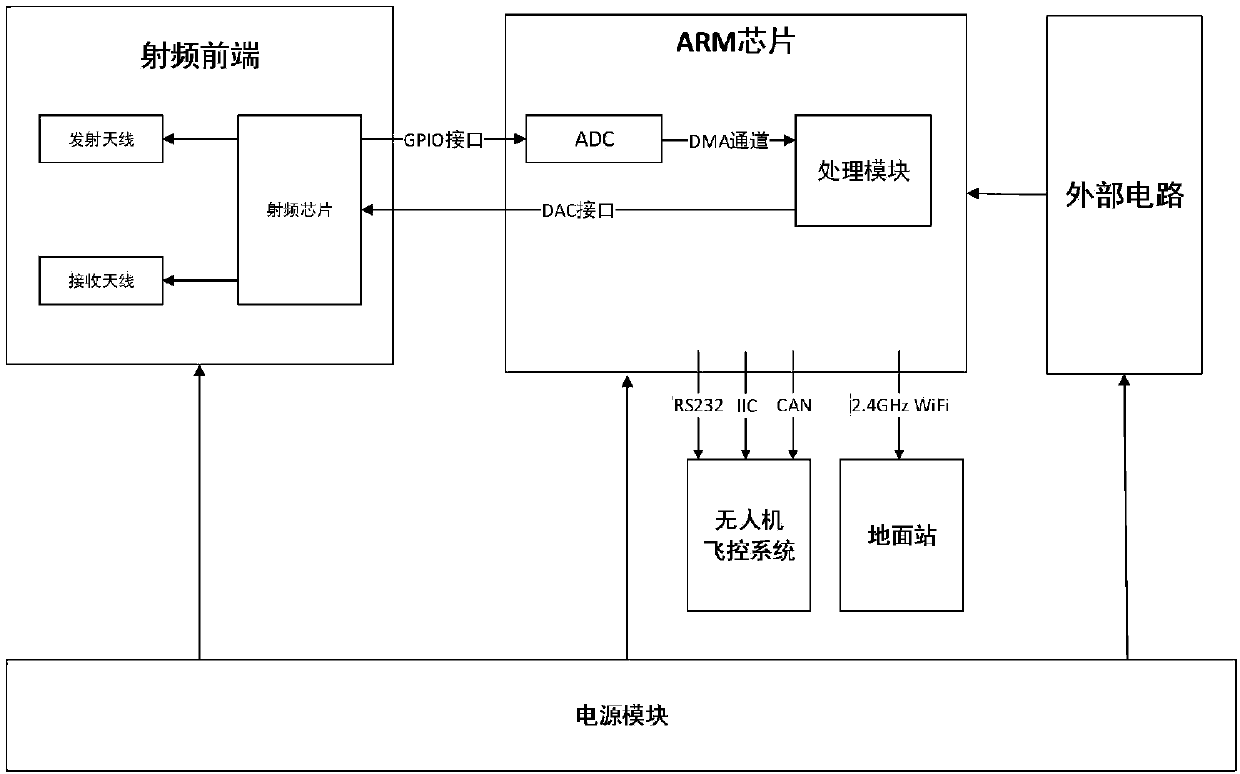
[0037] This embodiment provides a radar altimeter system for a power line patrol UAV, including:
[0038] RF front-end: built-in Infineon RF chip, used to control the sending waveform and receiving echo; the sending antenna and receiving antenna use an independent channel of sending and receiving;
[0039] Arm chip, use the DAC module in the chip to control the radio frequency chip, use the ADC module to receive I and Q data through the GPIO interface, and send the data to the processing module CPU through the DMA channel for calculation, without occupying other peripheral clocks; the processing module CPU Carry out relevant calculations, including FFT calculations, height calculations, etc., and exchange the calculated distance values with the UAV flight control system and the ground station through the interface; preferably, the CPU uses RS232, CAN bus and IIC bus to communicate with The flight control system performs data interaction, and the CPU performs data interaction...
Embodiment 2
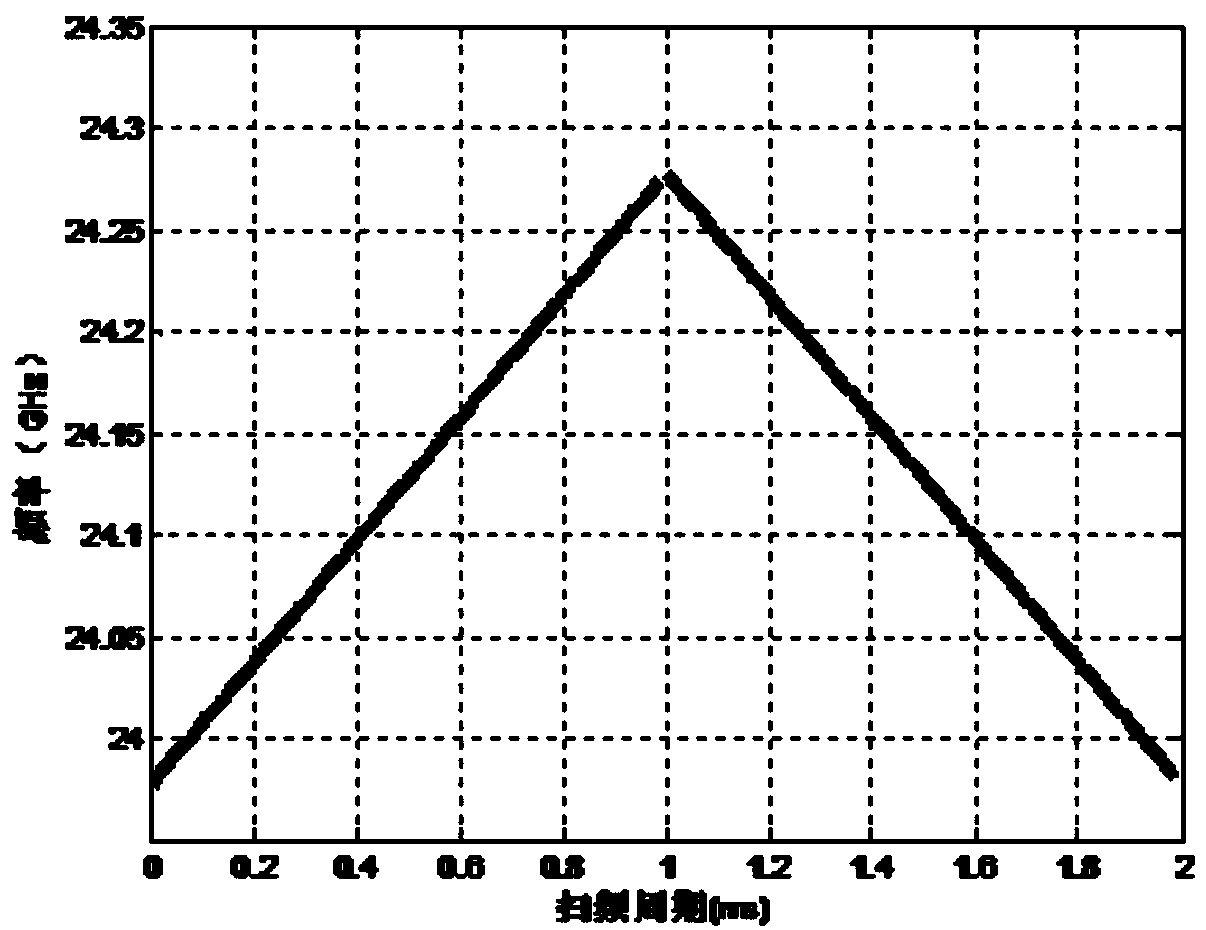
[0047] This embodiment provides a signal processing method for the radar altimeter system of a power patrol UAV, which calculates the distance from the radar to the measured object through one channel of IQ data, and the up-sweep and down-sweep frequency are processed before the step of calculating the distance same;
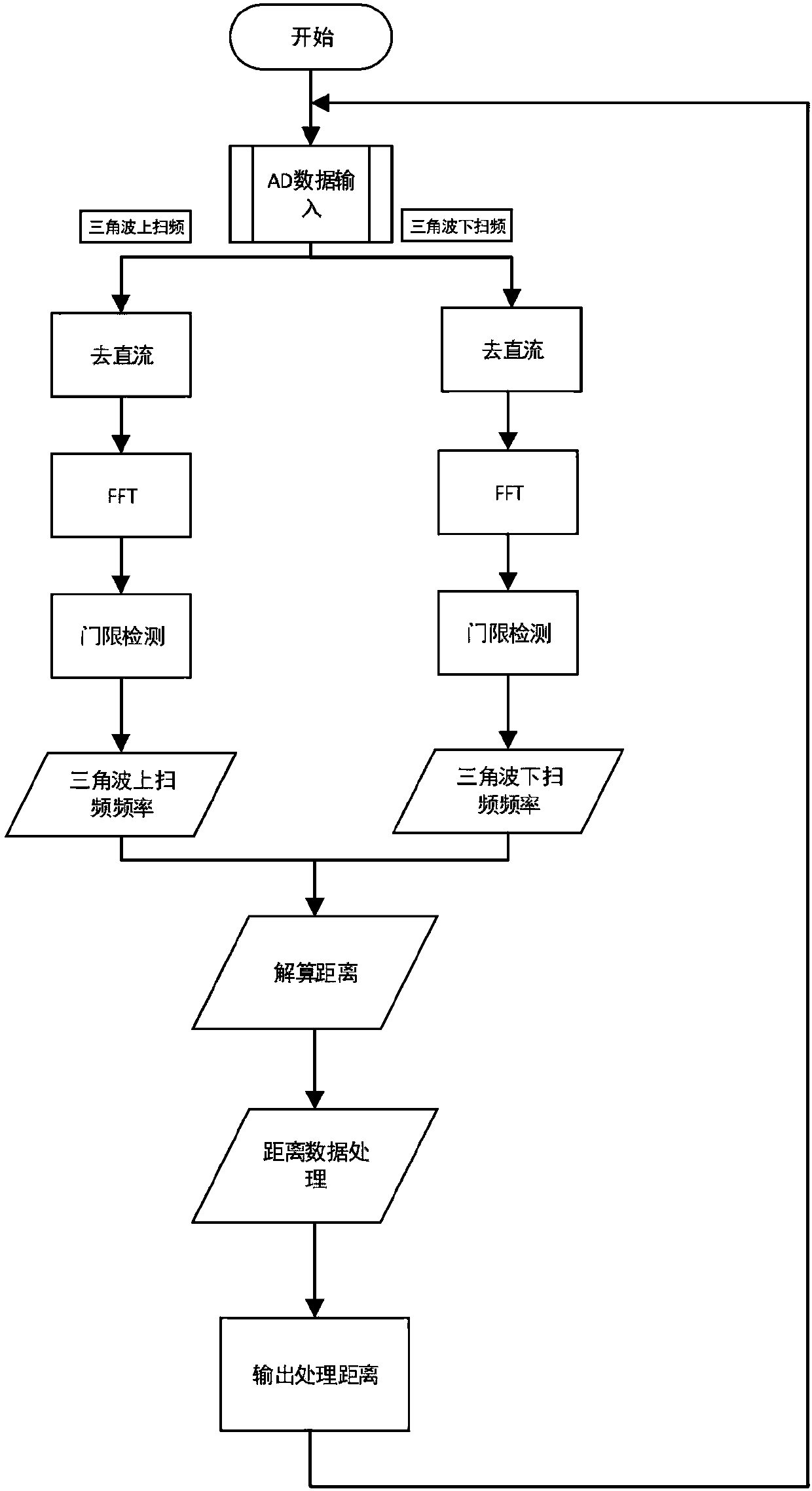
[0048] The above methods specifically include:
[0049] S1, AD data input: collect one channel of I and Q data through the ADC module of the Arm chip;
[0050] S2, to remove DC: subtract the mean value of the sum of the respective data from each of the I and Q data, so as to remove the influence of the DC component.
[0051] S3, FFT calculation, threshold detection: perform FFT transformation on the I and Q data after DC removal, convert the time domain data into frequency domain data, and take the modulus of the calculated complex number; perform CFAR threshold detection on the frequency domain data, and find The point with the largest threshold range; mainly...
Embodiment 3
[0056] As a supplement to Embodiment 2, the above method further includes: S5, performing data processing on the calculated height H. This step is mainly to perform post-processing of the calculated height, that is, to propose data abnormal points and smooth data.
[0057] Carry out data processing to height H in S5, comprise the step of filter processing: adopt α-β filter, the prediction equation of its constant gain filter is X(k+1 / k)=ΦX(k / k), filter equation is X(k+1 / k+1)=X(k+1 / k)+K[Z(k+1)-H(k+1 / k)], where X(k / k) is time k The filter value of , X(k+1 / k) is the predicted value of k time to the next time, Z(k) is the observed value of k time;
[0058] When the target motion equation adopts a constant velocity model, the constant gain matrix K=[α,β / T] T , its state transition matrix The measurement matrix of this model is H=[1,0];
[0059] The α-β filter satisfies the constant gain matrix K, the state transition matrix Φ, and the measurement matrix H are the constant gain ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com