UAV adaptive tracking control algorithm based on saturation limited condition
An adaptive tracking and control algorithm technology, applied in adaptive control, attitude control, general control system, etc., can solve problems such as reduced flight control performance and system instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0106] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0107] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
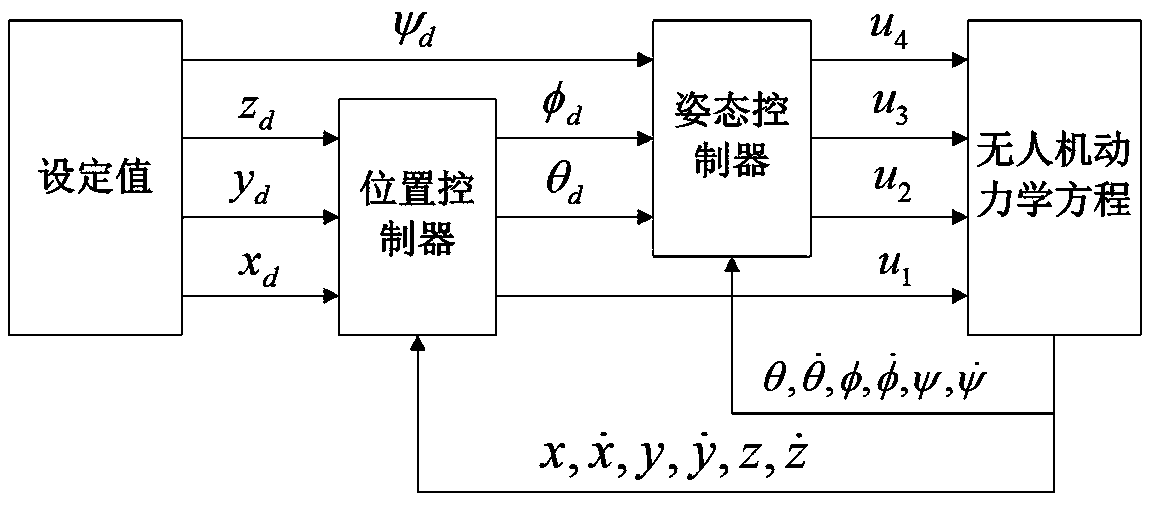
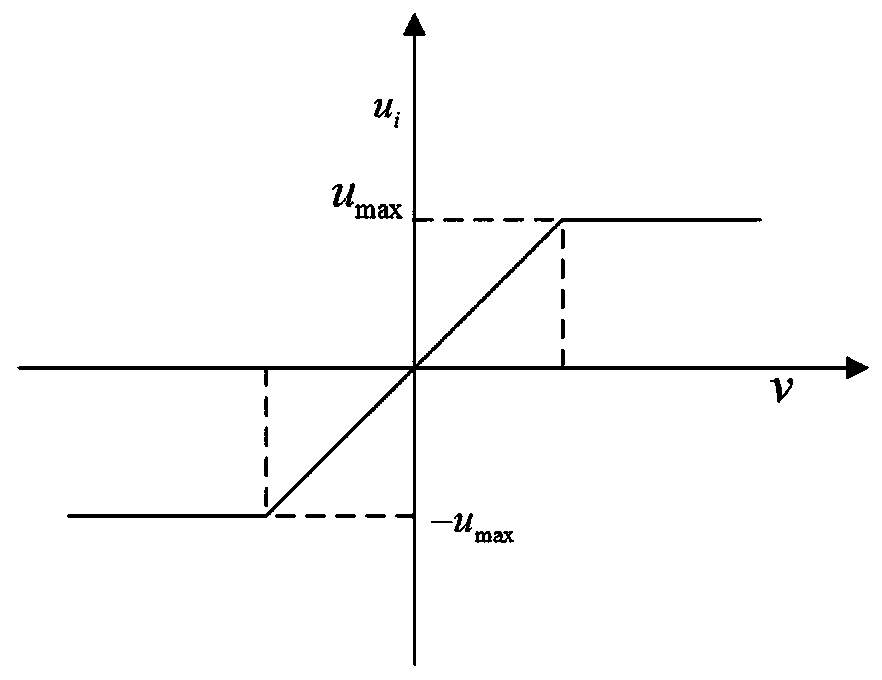
[0108] The purpose of the present invention is to provide a kind of UAV adaptive tracking control algorithm based on the condition of saturation limitation. The realization idea is as follows: firstly, based on the Newton-Euler model, a non-linear, underactuated quadrotor UAV model is established. , realize the mathematical processing of the quadrotor UAV; then, based on the input saturation limited function model, establish the system framework and select the input limited function; secondly, based on the sliding mode variable structure control method, realize the position subsystem of the quadrotor UAV Finally, based on the adaptive tracking control method, the active disturbance rejection control is introduced to deal wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com