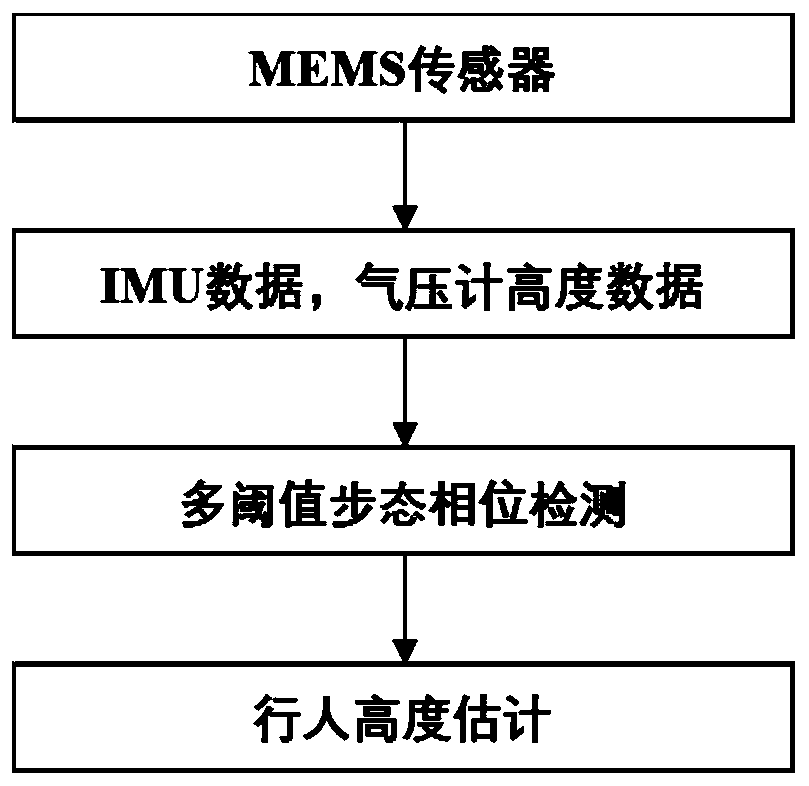
Method for estimating pedestrian height position in multi-story building based on MEMS sensor
A multi-storey building, sensor technology, applied in directions such as navigation through speed/acceleration measurement, can solve the problems of poor portability of the detection system, and achieve the effect of simplifying the motion state and high detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
experiment example 1
[0077] The subject walked from the first floor to the fourth floor for about 5 minutes. The simplified experimental scene is as follows: Image 6 shown. The heights of each floor are 4.31m, 3.46m and 3.46m respectively. The subjects' activities in this multi-storey building included walking on flat ground, going upstairs and going downstairs by elevator (in order to show that the three tests conducted were continuous). Based on the above-mentioned basic motion scene, the pedestrian height estimation method of the present invention is used to estimate the height position of the pedestrian in the multi-storey building, and the estimation result is as follows Figure 7 shown. Where 1 represents the pedestrian height position estimation based on complementary filtering and target error compensation. In order to evaluate the accuracy of the height estimation, the error between the estimated height and the actual stair height is analyzed, as shown in Table 2. The real value is th...
experiment example 2
[0084] Build an indoor walking platform, the schematic diagram of the platform model is as follows Figure 9 As shown, the following description is made according to the walking route direction of pedestrians "going up the stairs from the left and getting off the stairs from the right": the height of the first four single steps on the left is 0.12m, the last step is 0.28m, and the height of the first step on the right is 0.12m. The height of one step is 0.22m, and the height of the other three steps is 0.18m. Since the sensor device is worn on the right calf of the pedestrian and the left and right legs alternately step on the steps, the subject walks up the first step with the right foot in the first step, the second step with the left foot in the second step, and the third step with the right foot in the third step. The fourth step is to go up the fourth step with the left foot, the fifth step is to go up the highest point with the right foot, the sixth to eighth steps alter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com