Horizontal type lower limb rehabilitation intelligent interactive robot group system based on ad-hoc network navigation for ICU (Intensive Care Unit) sickroom
A rehabilitation robot and robot group technology, which can be applied to devices that cause sleep or relaxation, passive exercise equipment, physical therapy, etc., can solve the problems of inability to accurately control training time and intensity, labor burden, and single rehabilitation training mode. Achieve the effect of improving credibility and credibility, reducing labor burden, and improving treatment efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
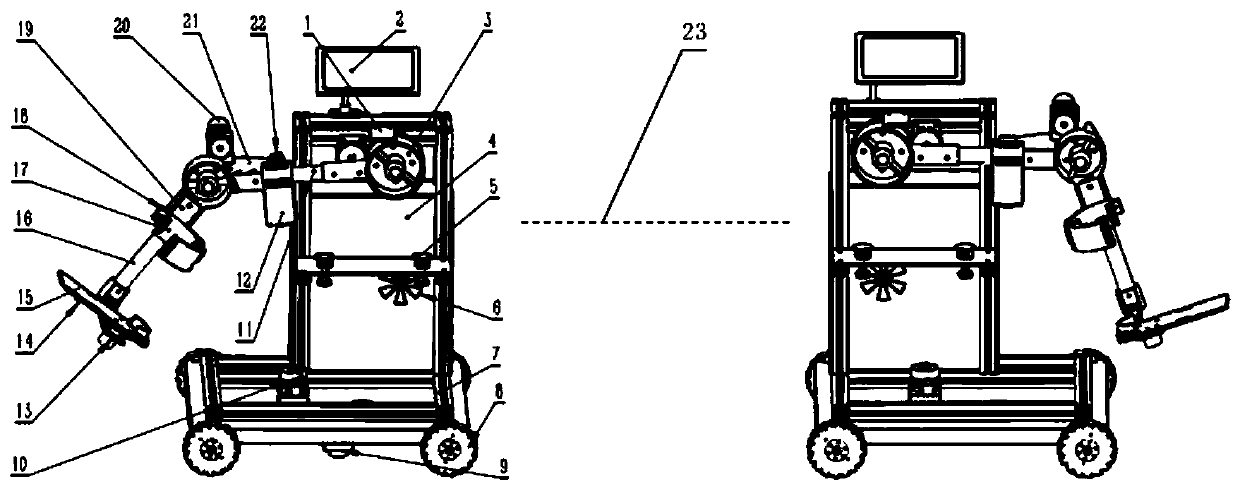
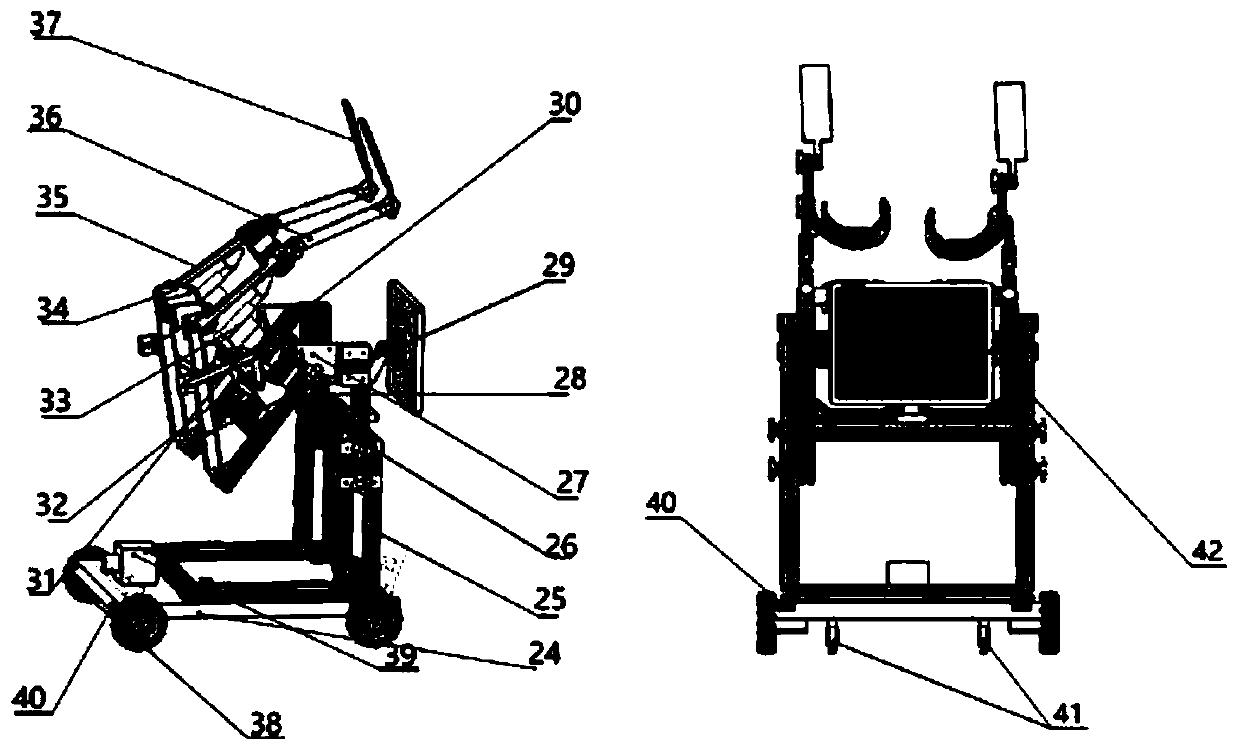
[0036] Before rehabilitation training, medical staff use APP to set the navigation route of each robot in the rehabilitation robot group. Each rehabilitation robot uses navigation algorithms to achieve close-range and precise navigation. During the movement, the lower limb rehabilitation robot uses lidar for obstacle avoidance detection; After the rehabilitation robot arrives at the designated location, the medical staff disinfects it outside the ICU ward and connects it rigidly to the bed. Then the doctor fixes the patient’s lower limbs with the rehabilitation robot’s lower limb exoskeleton and adjusts its structure to meet the patient’s needs Comfortable requirements; when the power is turned on, the rehabilitation robot group conducts various data inspections on the ICU patients during the rehabilitation training process, and conducts data synthesis and processing through the robot communication module. The rehabilitation evaluation system provides the most suitable ICU patien...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com