An image-based gastrointestinal three-dimensional reconstruction and visualization method
A three-dimensional reconstruction and gastrointestinal technology, applied in the field of three-dimensional reconstruction, can solve the problems of model registration errors, and achieve the effects of improving accuracy, increasing robustness, and reducing motion estimation errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
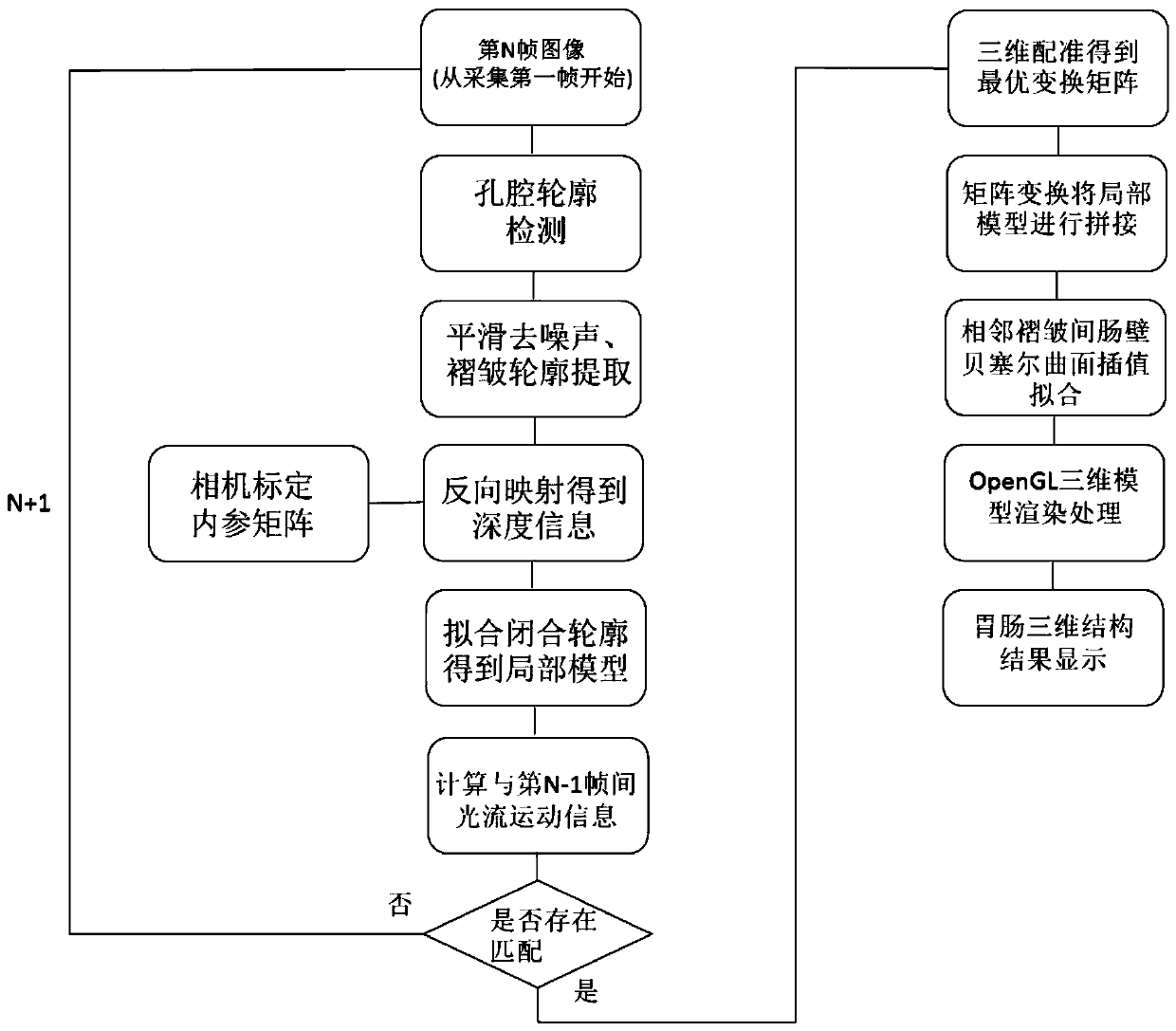
[0040] The embodiment of the present invention provides an image-based three-dimensional reconstruction and visualization method of the gastrointestinal tract, wherein a camera for collecting images is fixedly connected to the capsule robot, the method utilizes the edge features of the gastrointestinal fold contour, and reverses the two-dimensional features through the camera's internal parameters Map to the three-dimensional space, further subdivide the three-dimensional point set to obtain the local three-dimensional structure, and then perform the three-dimensional space registration of the local structure to calculate the motion transformation matrix, and use the motion transformation matrix to convert the local structure to the global coordinate system to complete the complete Reconstruction of the model. like figure 1 As shown, it mainly includes the following steps:
[0041] In step 1, the monocular camera is calibrated to obtain the camera internal parameter matrix. ...
Embodiment 2
[0067] Embodiment 2: Further, step 5 may also be implemented in a discontinuous real-time reconstruction scenario.
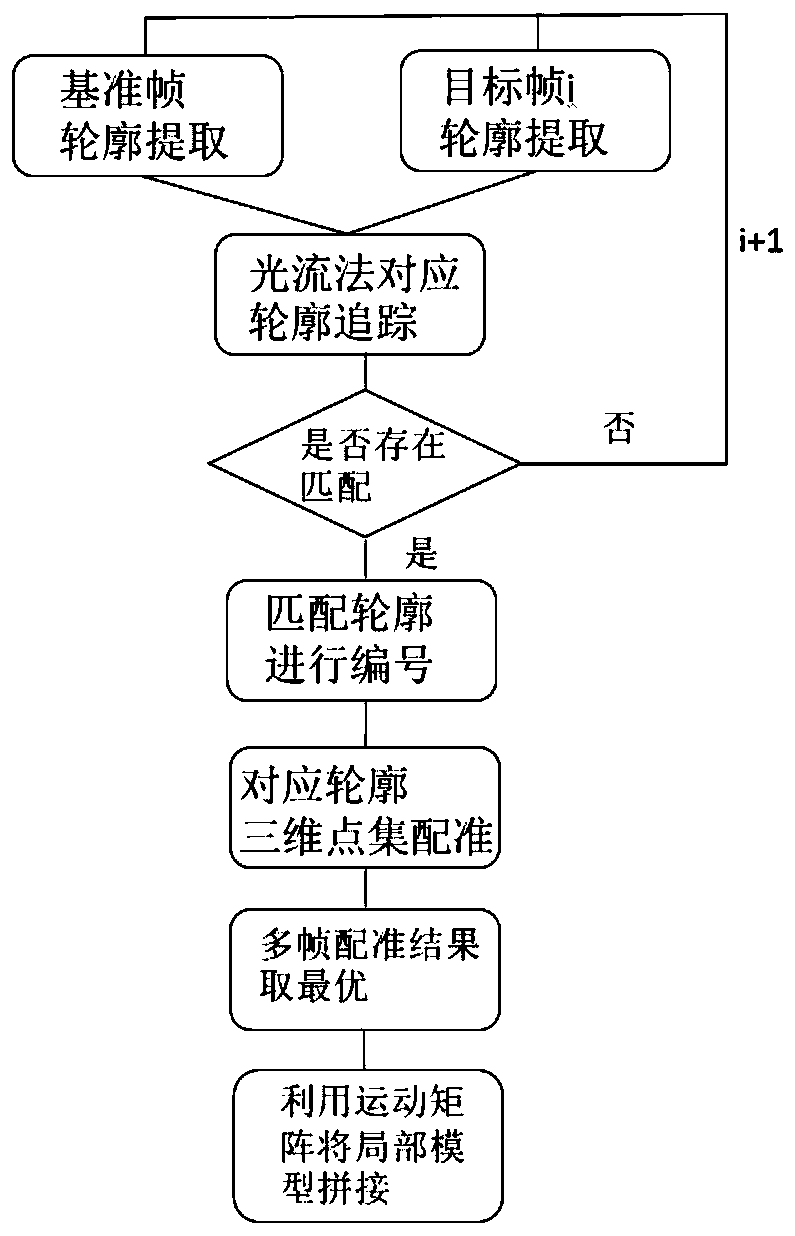
[0068] An image-based three-dimensional reconstruction and visualization method of the gastrointestinal tract, wherein steps 1 to 3 are the same as steps 1 to 3 in the first embodiment; step 4: when there is no overlap between two adjacent frames of images, use the active capsule robot system The provided camera motion transformation matrix is used to register and stitch the reconstructed local 3D models corresponding to the two frames of images, so that all local models are transformed into the global coordinate system, and the interval between adjacent local 3D models is connected by Bezier curves. The overall three-dimensional structure of the gastrointestinal tract is obtained by fitting, such as Figure 5 shown.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com